تطوير نظام Control Rig إجرائي لعقرب باستخدام Unreal Engine 5
تفاصيل العمل
وصف العمل
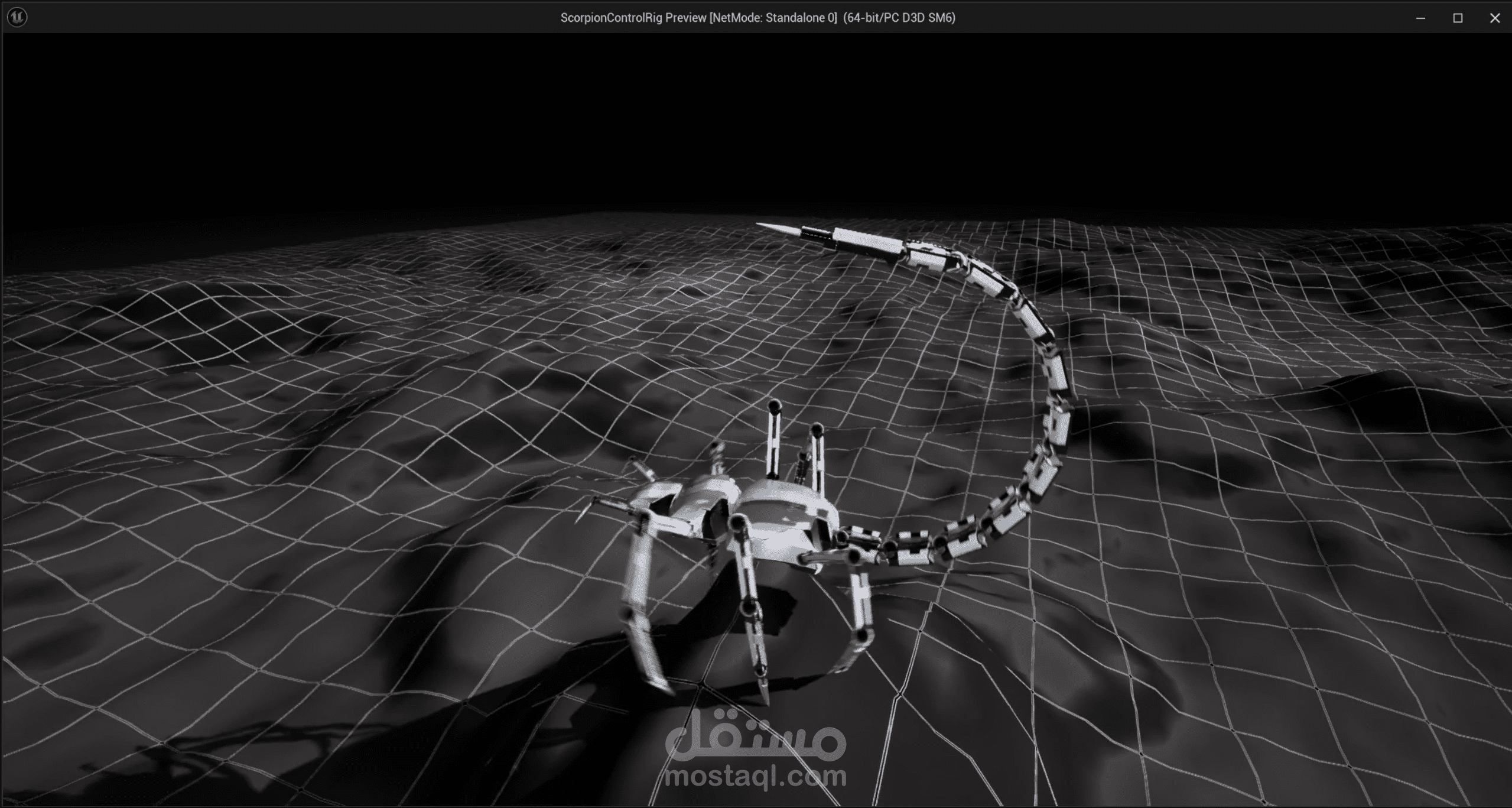
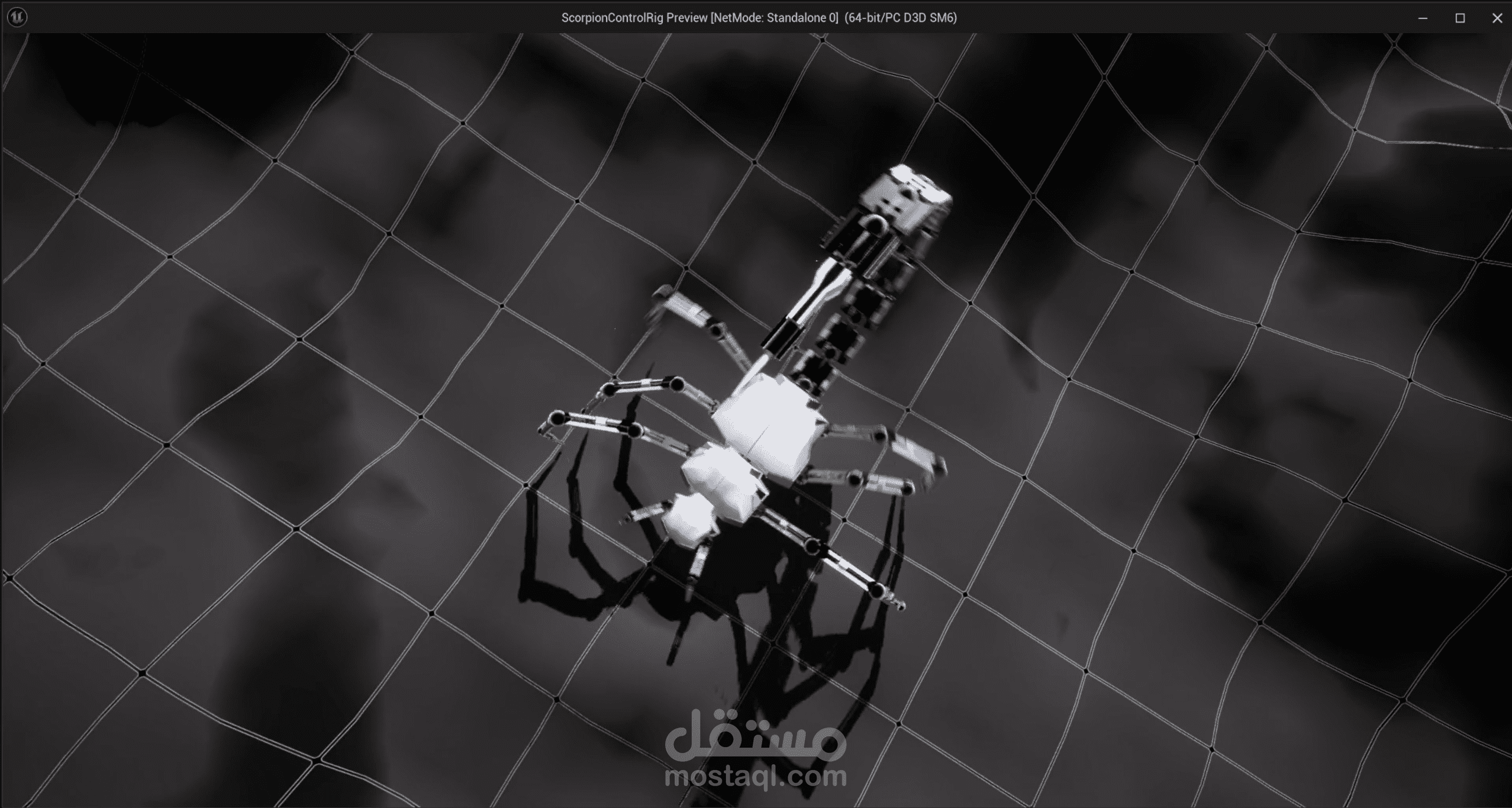
قمت بتطوير نظام Control Rig إجرائي (Procedural) لعقرب داخل
Unreal Engine 5،
يركّز على إنشاء حركات واقعية وديناميكية بدون الاعتماد على أنيميشن جاهز (Keyframed Animation).
المشروع يعتمد على منطق Procedural Animation لتوليد الحركة تلقائيًا، مع قابلية التفاعل مع البيئة وتحقيق سلوك حركي طبيعي.
ماذا قدمت في هذا العمل
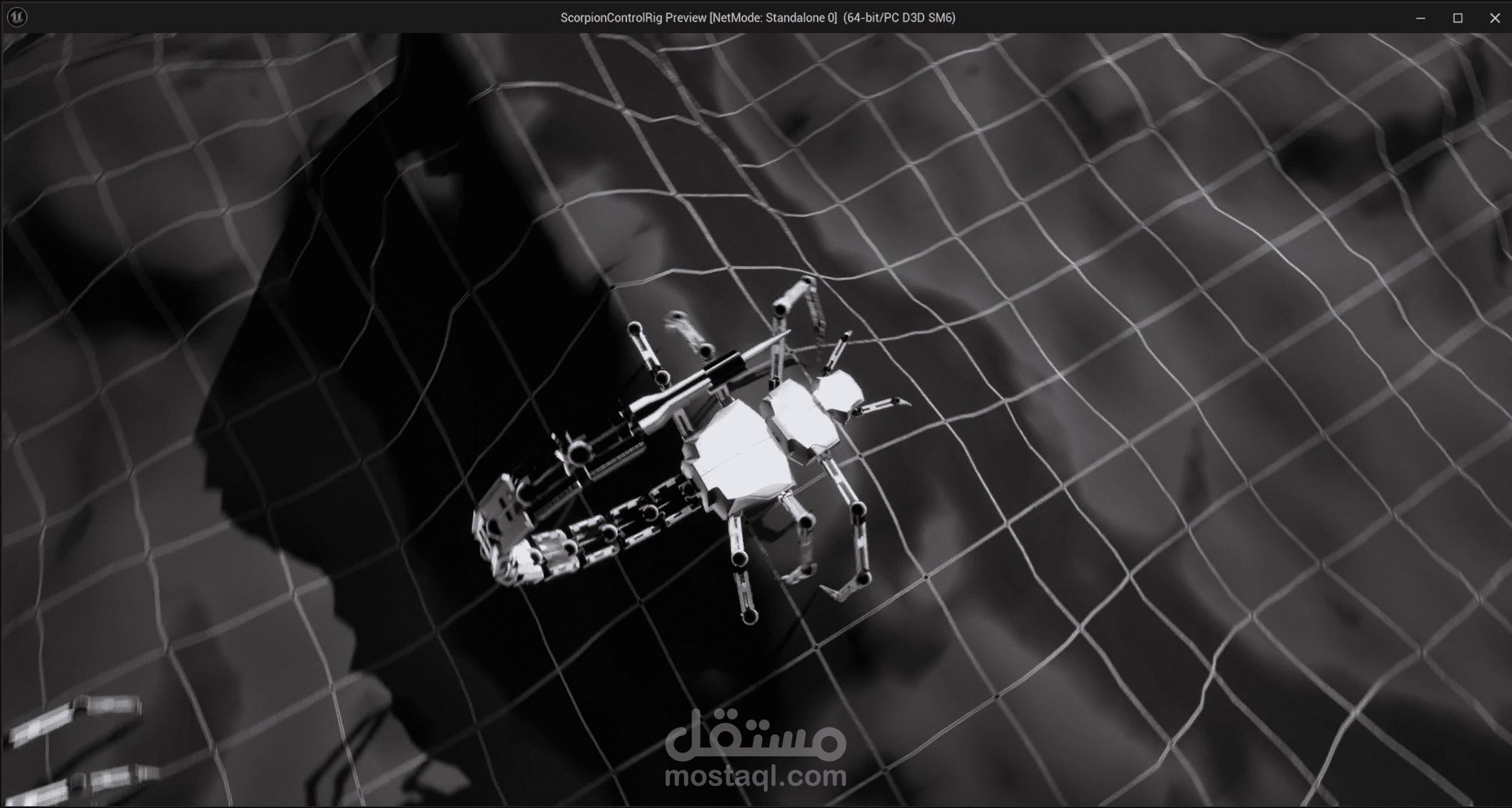
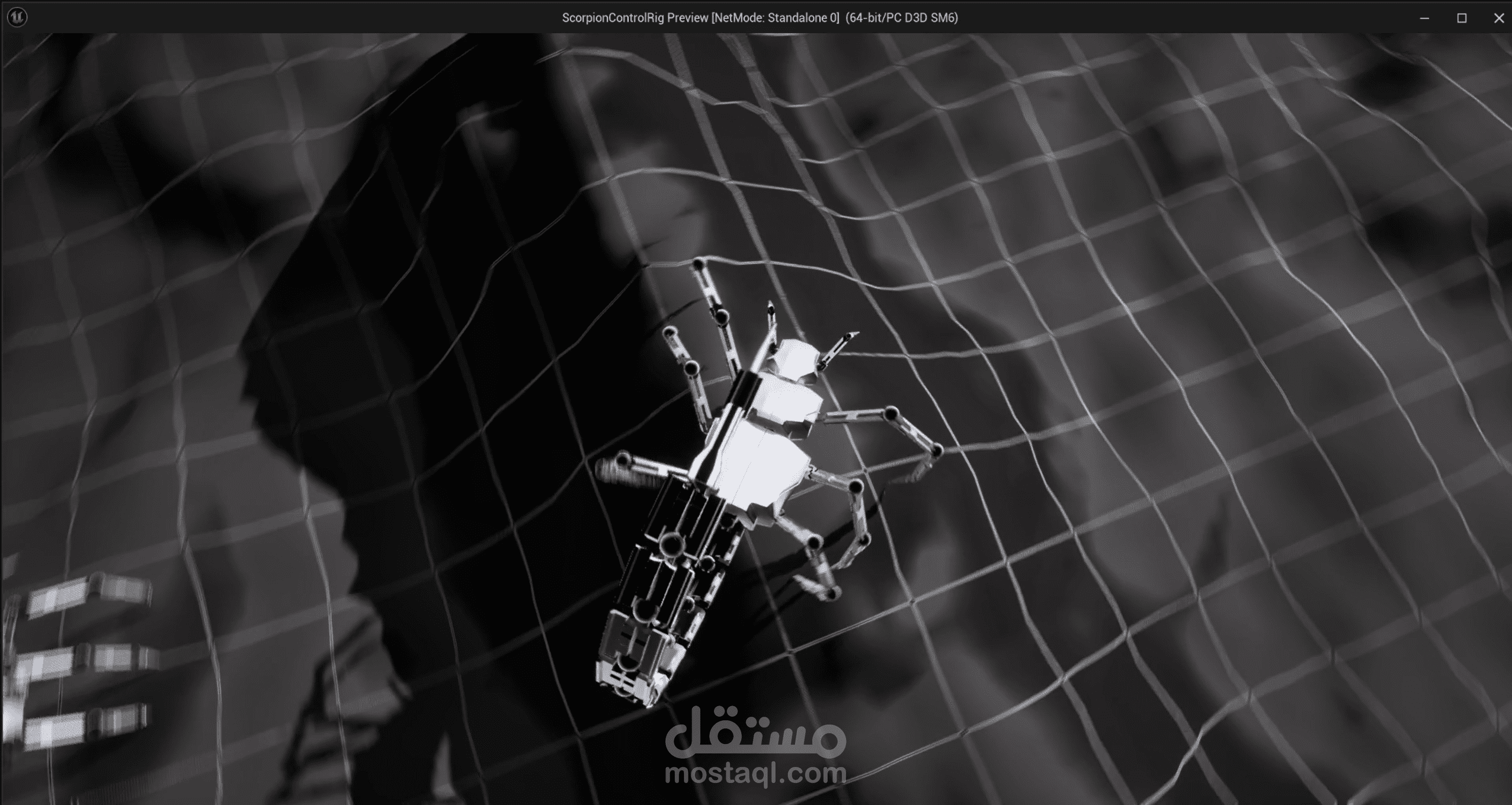
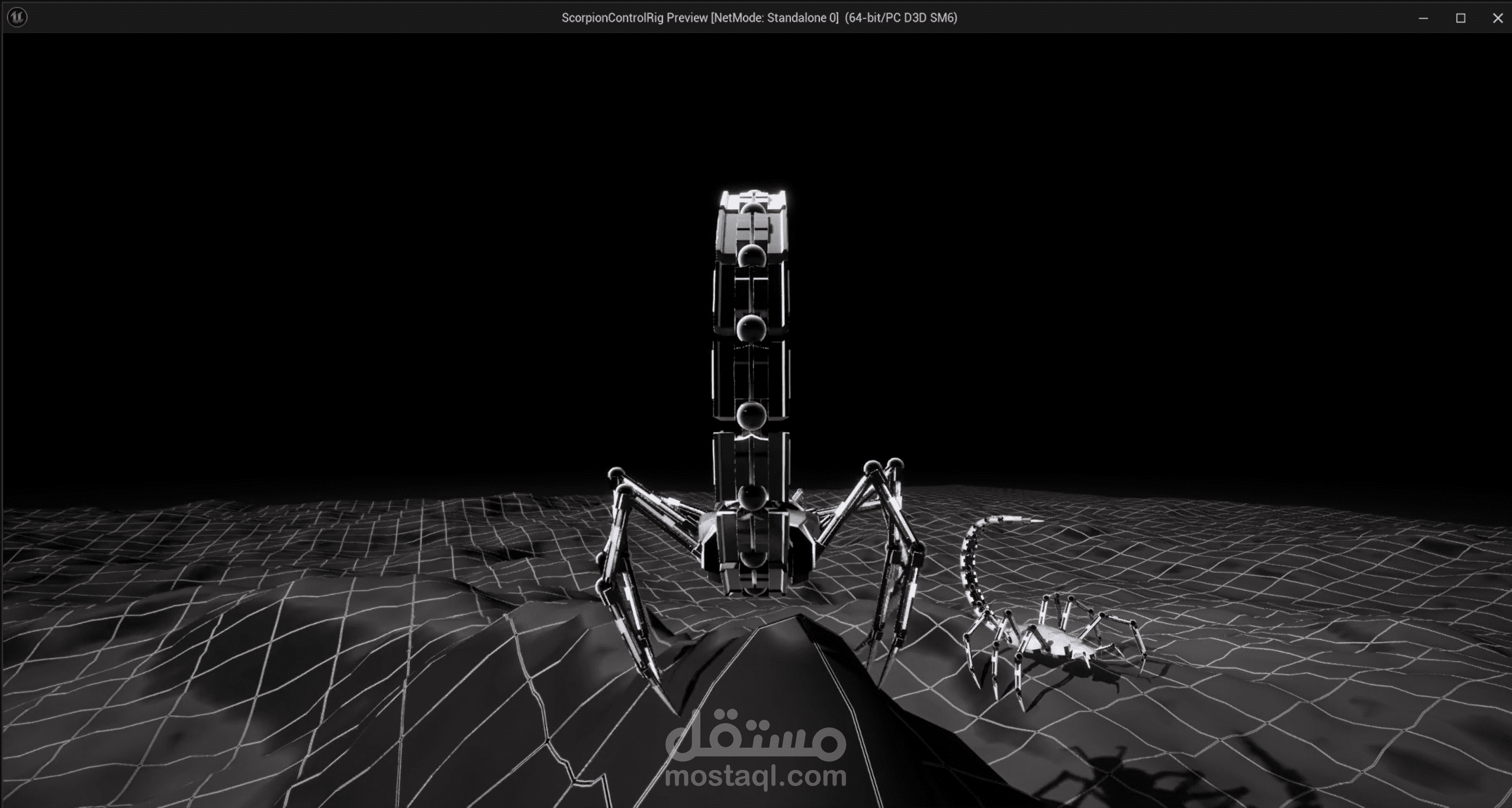
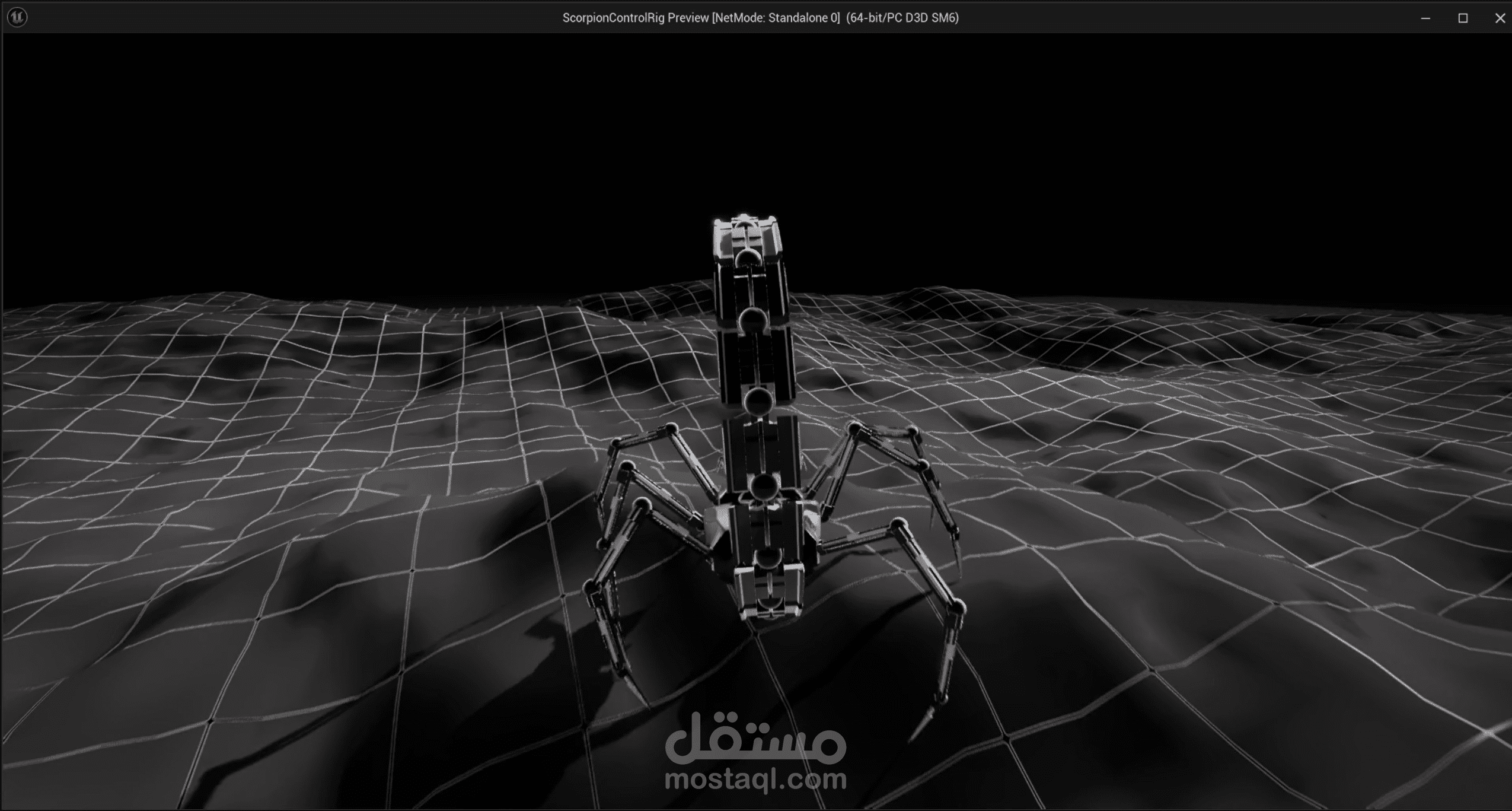
إنشاء Control Rig كامل لعقرب من الصفر
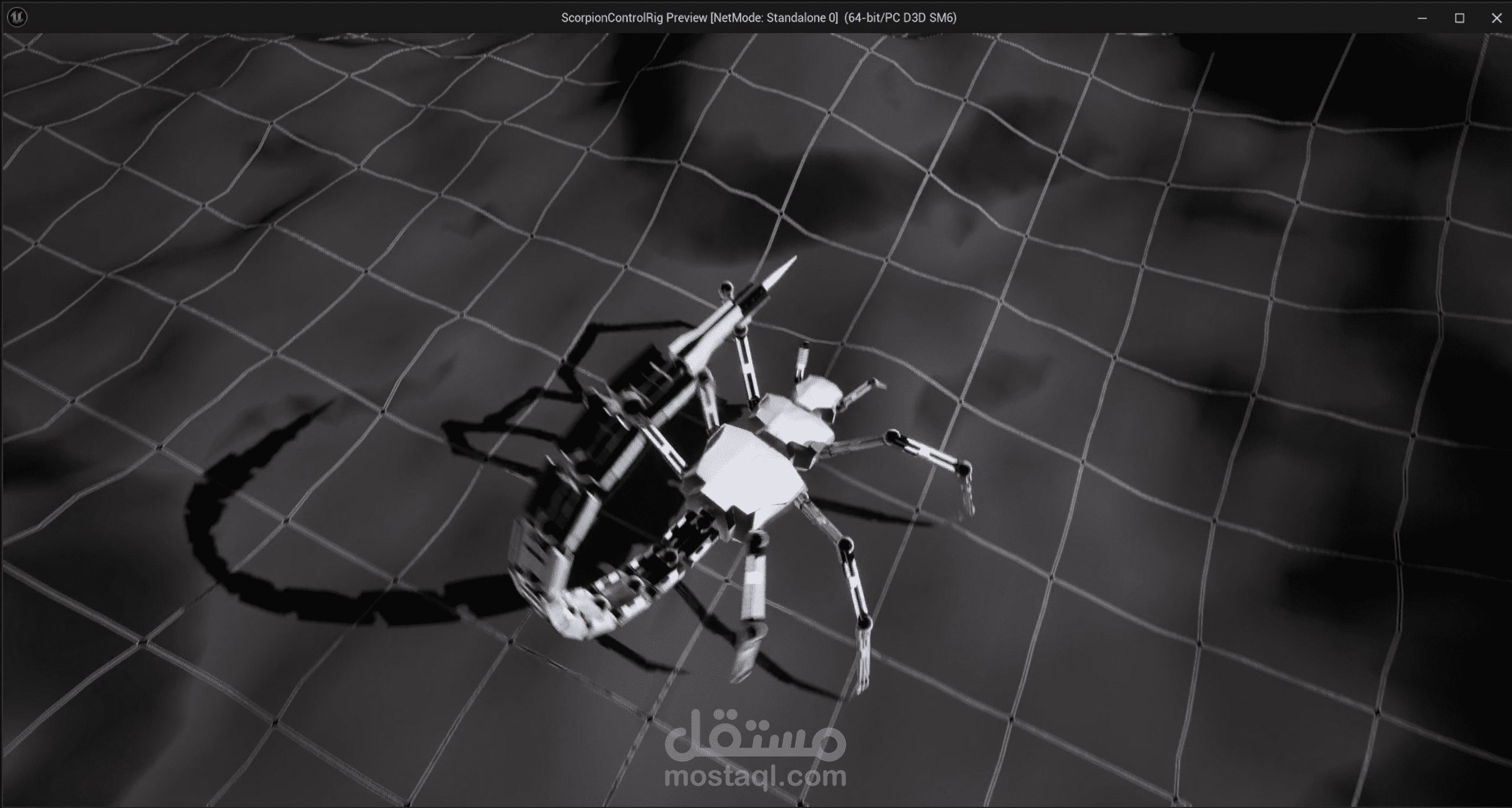
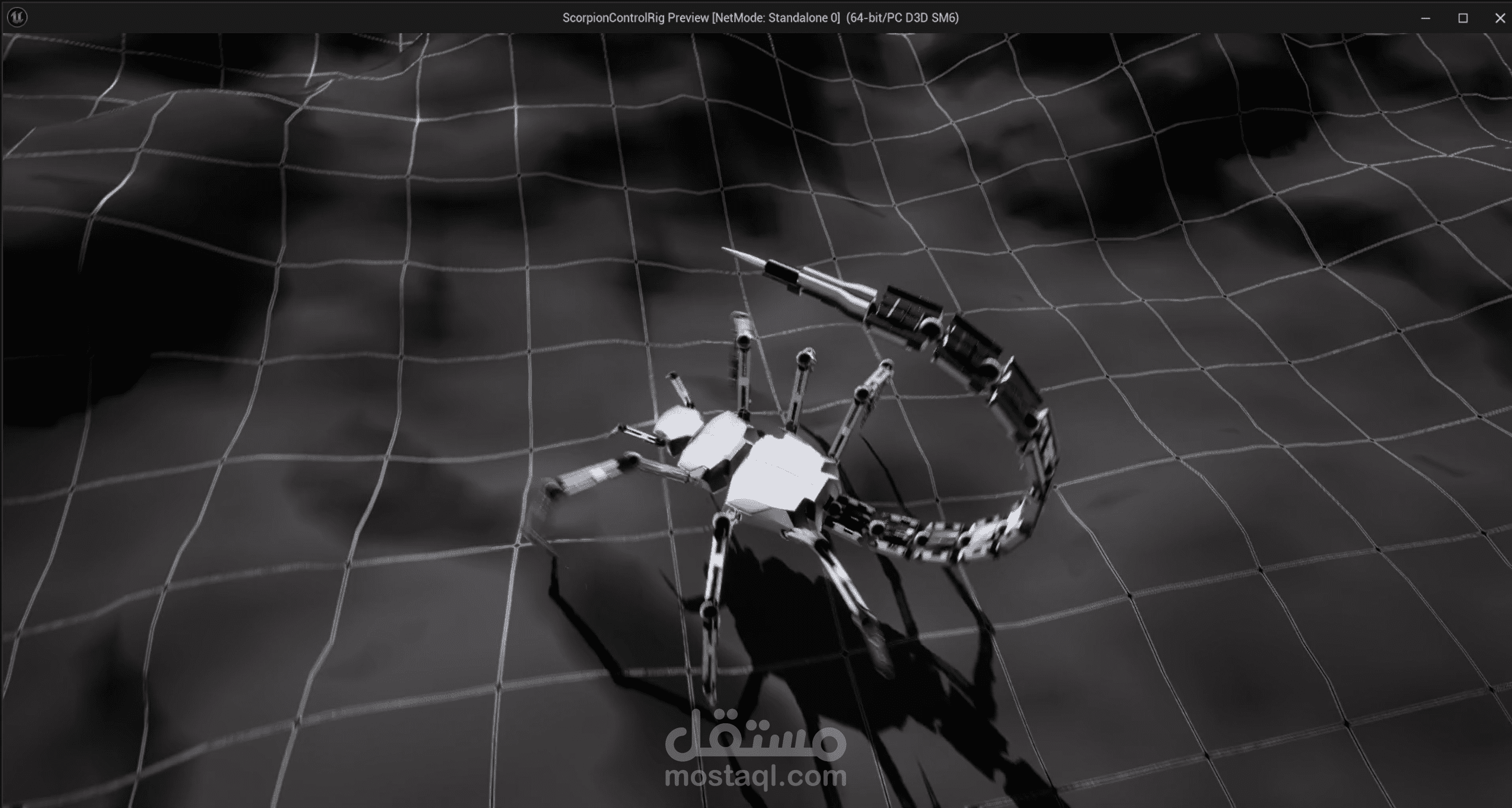
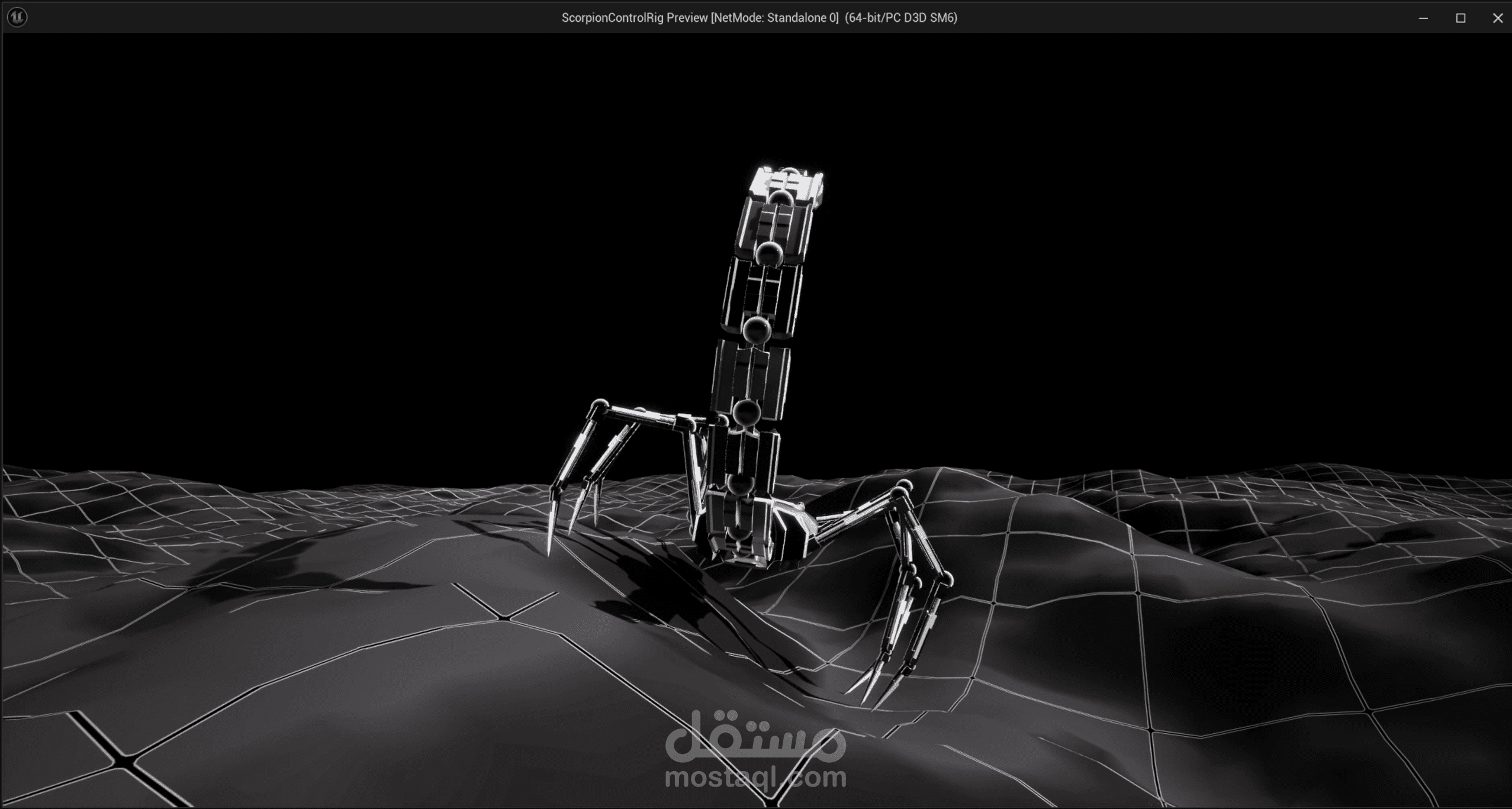
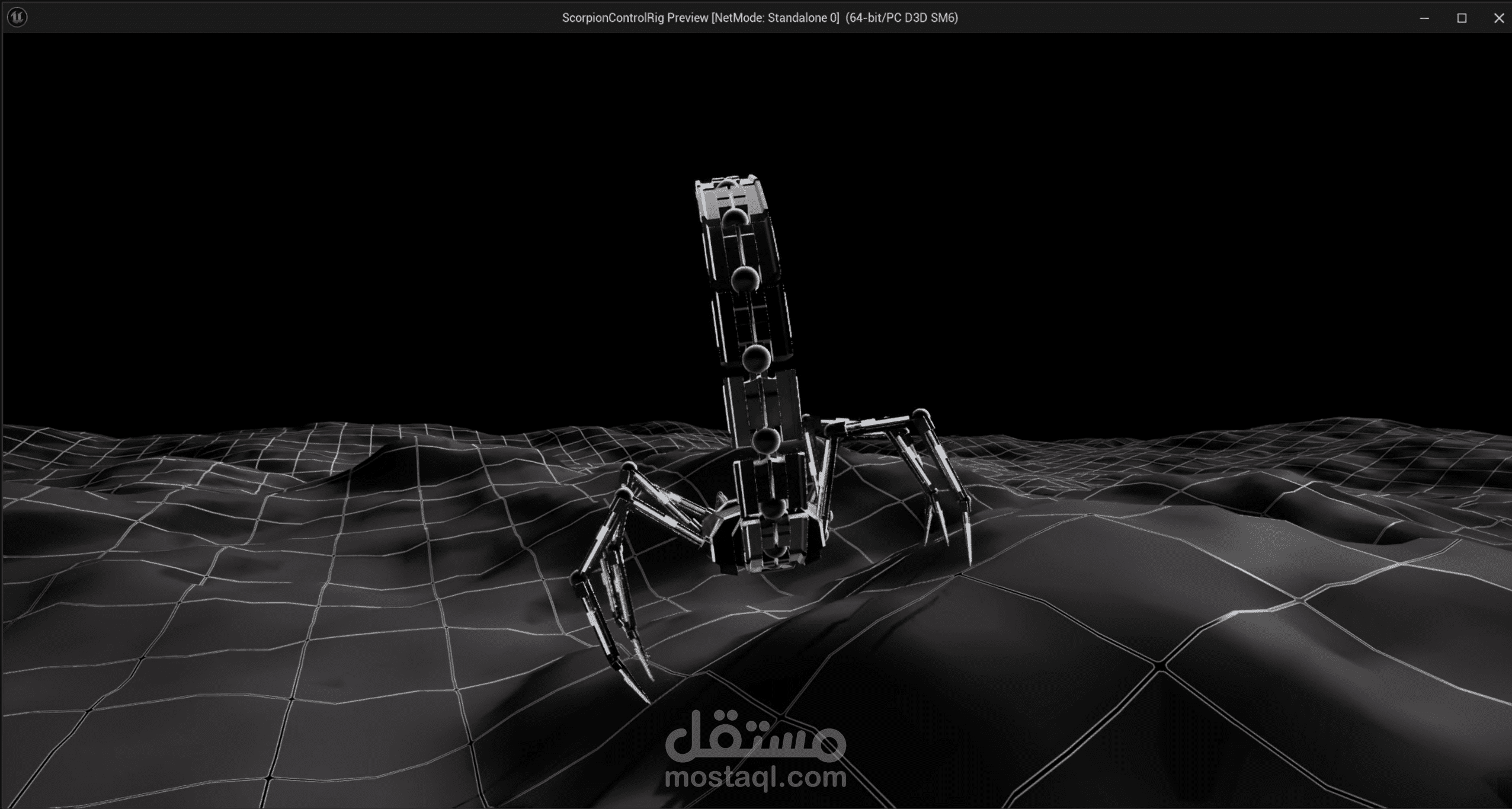
تطوير نظام مشي إجرائي (Procedural Walk System)
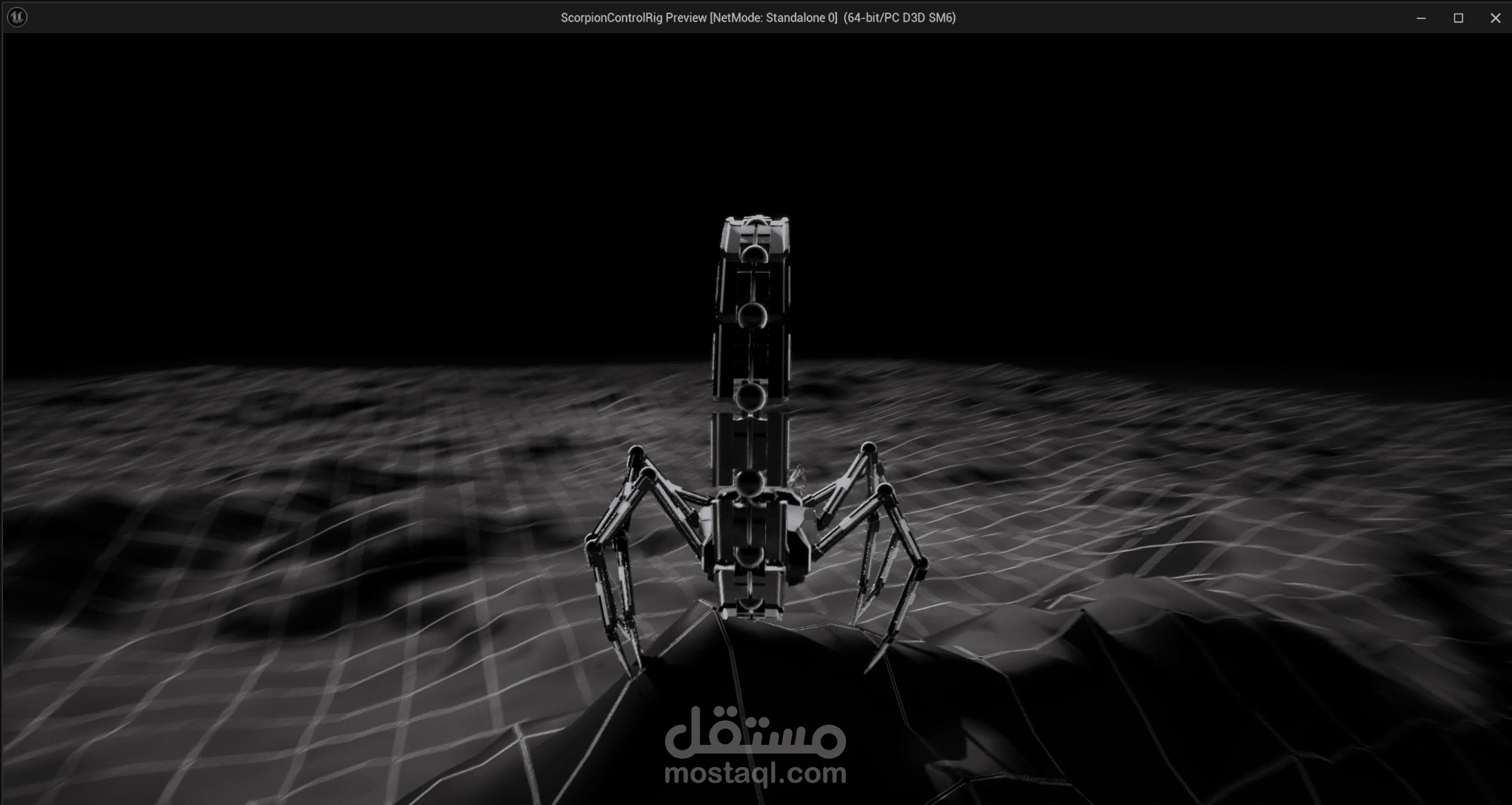
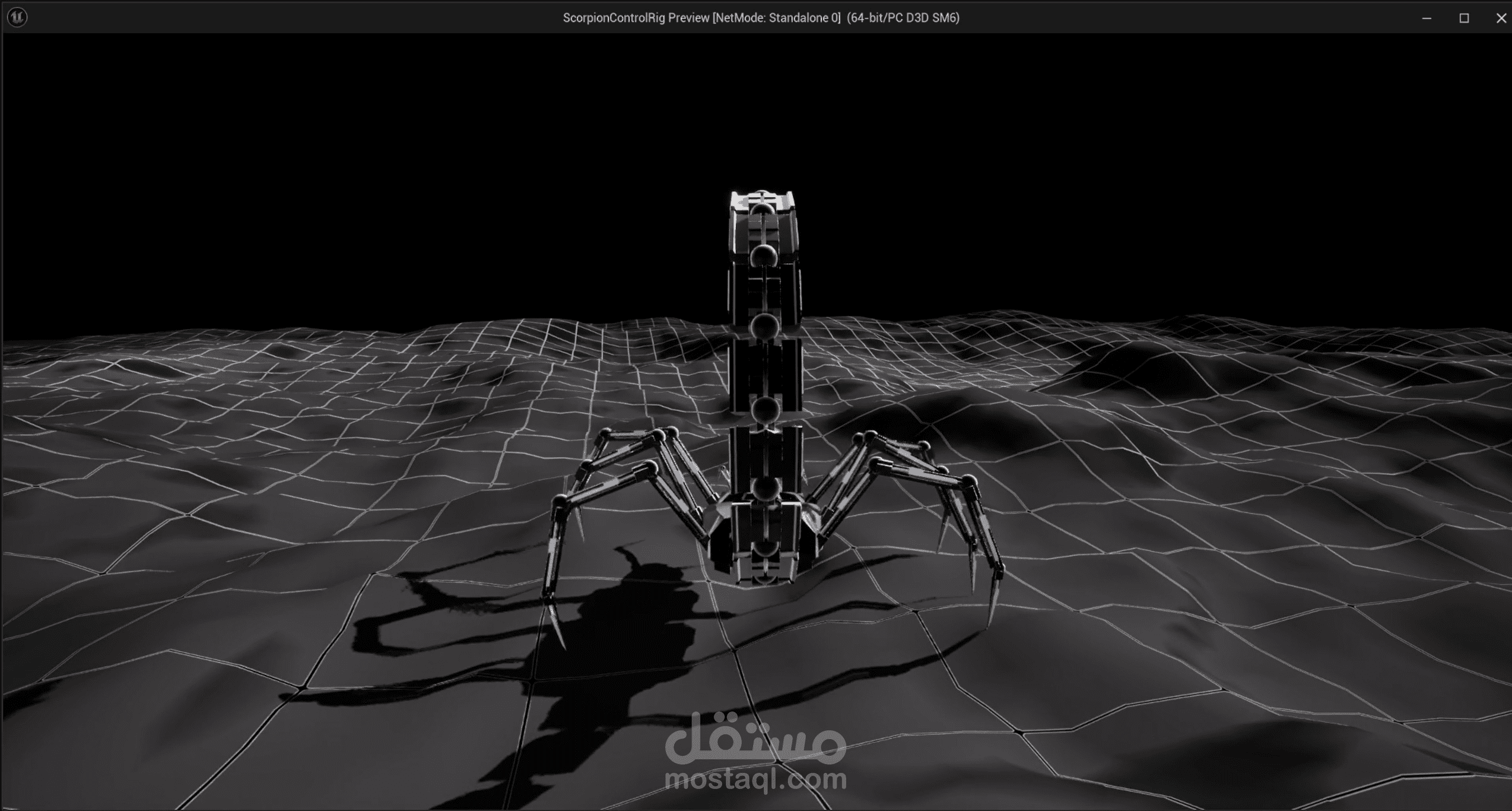
ضبط حركة الأرجل وتوازن الجسم ديناميكيًا
إنشاء منطق تفاعل مع الأرض والأسطح
تصميم نظام دوران في المكان (Turn In Place)
العمل على الحسابات المنطقية للحركة داخل Control Rig
تحسين السلاسة والاستقرار في الحركة
فهم وتطبيق مفاهيم متقدمة في Procedural Animation
الأدوات والتقنيات المستخدمة
Unreal Engine 5
Control Rig
Procedural Animation Systems
Rig Logic & Math Nodes
Real-Time Animation Techniques
نوع المشروع
Procedural Animation – Control Rig – Character Rigging
ملاحظات
التقنيات المستخدمة مناسبة لـ:
ألعاب Single Player & Multiplayer
مشاريع UEFN
شخصيات تحتاج حركة ديناميكية ومتغيرة
أنظمة Animation متقدمة بدون الاعتماد الكامل على Animations جاهزة
نقطة قوة المشروع
المشروع يوضح القدرة على فهم وبناء أنظمة Animation منطقية
وليس فقط استخدام أنيميشن جاهز، مما يجعله مناسبًا للألعاب المتقدمة والمشاريع الكبيرة.