implementing advanced ml for self-driving cars
تفاصيل العمل
مشروع: تطبيق تقنيات التعلم الآلي المتقدم للسيارات ذاتية القيادة
وصف المشروع:
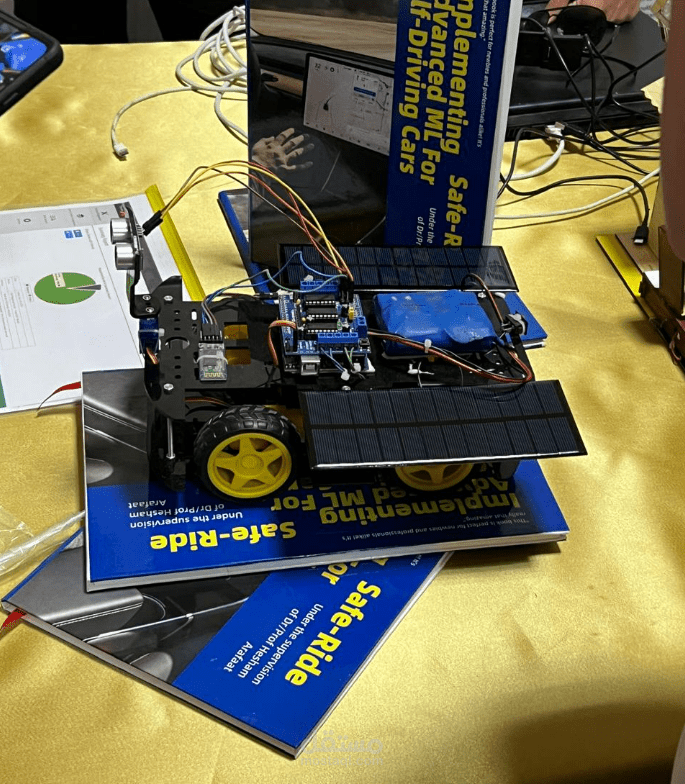
تم تطوير نموذج سيارة ذاتية القيادة باستخدام خوارزمية SVM (Support Vector Machine) لمعالجة بيانات مستشعرات المسافة واتخاذ قرارات ذكية أثناء القيادة. تعتمد السيارة على لوحة أردوينو أونو (Arduino Uno) كوحدة تحكم رئيسية لتنفيذ الأوامر والتفاعل مع المستشعرات والمحركات، مما يتيح لها التنقل بذكاء في بيئة مليئة بالعوائق.
التقنيات والمكونات المستخدمة:
أردوينو أونو (Arduino Uno): لتنفيذ الأوامر والتحكم في المستشعرات والمحركات.
خوارزمية SVM: لاتخاذ قرارات القيادة الذكية بناءً على بيانات المستشعرات.
مستشعر مسافة (Ultrasonic Sensor): لاكتشاف العوائق على بُعد 50 سم والتفاعل معها.
محرك سيرفو (Servo Motor): يسمح للمستشعر بالدوران يمينًا ويسارًا لاستكشاف الطريق.
نظام تحكم مزدوج:
وضع القيادة الذاتية: تتحرك السيارة تلقائيًا مع اتخاذ قرارات ذكية عند مواجهة العقبات.
وضع التحكم اليدوي عبر الهاتف: يتم التحكم في السيارة باستخدام تطبيق موبايل كنترول عبر وحدة بلوتوث (Bluetooth Module).
آلية العمل:
تتحرك السيارة للأمام حتى يكتشف المستشعر عائقًا على بُعد 50 سم.
يدور مستشعر المسافة يمينًا ثم يسارًا باستخدام السيرفو لتقييم الطريق.
إذا كان الطريق مفتوحًا على اليمين، تتجه السيارة يمينًا؛ وإذا كان مغلقًا، تفحص الاتجاه الأيسر.
إذا كان كلا الاتجاهين مغلقين، تتوقف السيارة تلقائيًا.
في وضع التحكم اليدوي، يمكن قيادة السيارة عبر الهاتف باستخدام تطبيق مخصص.
النتائج والتطبيقات:
تمكنت السيارة من تحقيق تنقل ذاتي دقيق وفعال باستخدام الذكاء الاصطناعي والمستشعرات الذكية، مع القدرة على التبديل بين القيادة الذاتية والتحكم اليدوي، مما يجعلها مثالية لمجالات مثل الروبوتات المستقلة، أنظمة التنقل الذكية، والتدريب على تقنيات القيادة الذاتية.
التطبيقات المحتملة:
السيارات ذاتية القيادة في البيئات المغلقة أو المخصصة للتدريب.
تطوير أنظمة الروبوتات المستقلة للكشف عن العوائق والتكيف مع البيئة.
تحسين تقنيات التحكم عن بعد في المركبات الصغيرة باستخدام Arduino.