سيارة روبوت تقوم بتتبع الخطوط السوداء المرسومة على الارض مزودة بنظام تفادي العواقب
تفاصيل العمل
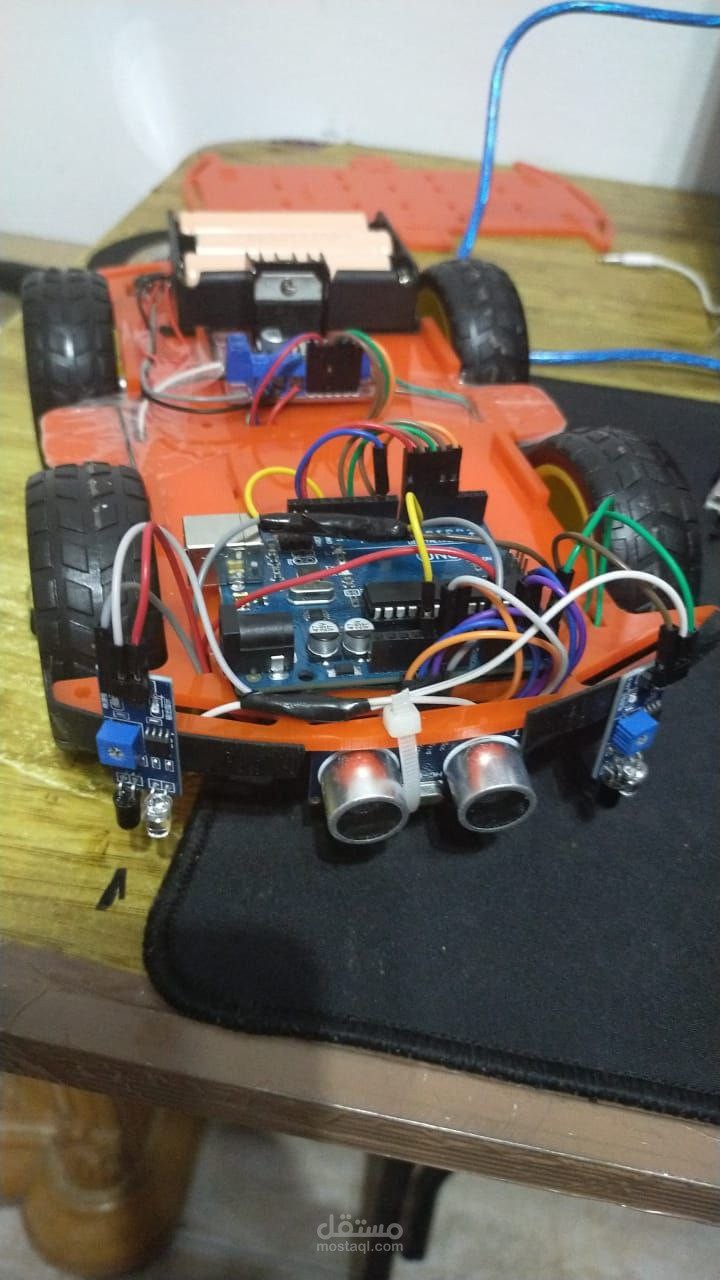
في البداية قمت بعمل سيارة روبوت (remote controlled car) تعمل بالتحكم عن بعد عن طريق برنامج على الهاتف
بعدها قمت بازالة نظام التحكم عن بعد وجعل السيارة تسير لحالها دون التدخل من اي انسان
بعد ذلك قما بعمل تعديلات عليها باضافة نظام تفادي العواقب (obstacle system) بحيث اذا وجدت اي عقبة امامها مثل جدار او زجاجة تقوم بتفاديها وذلك عن طريق مستشعر للموجات (ultrasonic sensor)
واخيرا قمت باضافة مستشعر للاشعة تحت الحمراء(infrared sensor ) لجعل السيارة تتبع الخطوط السوداء المرسومة على الارض وهو ما يسمى (line following task)
في هذا العمل قمت باستخدام:
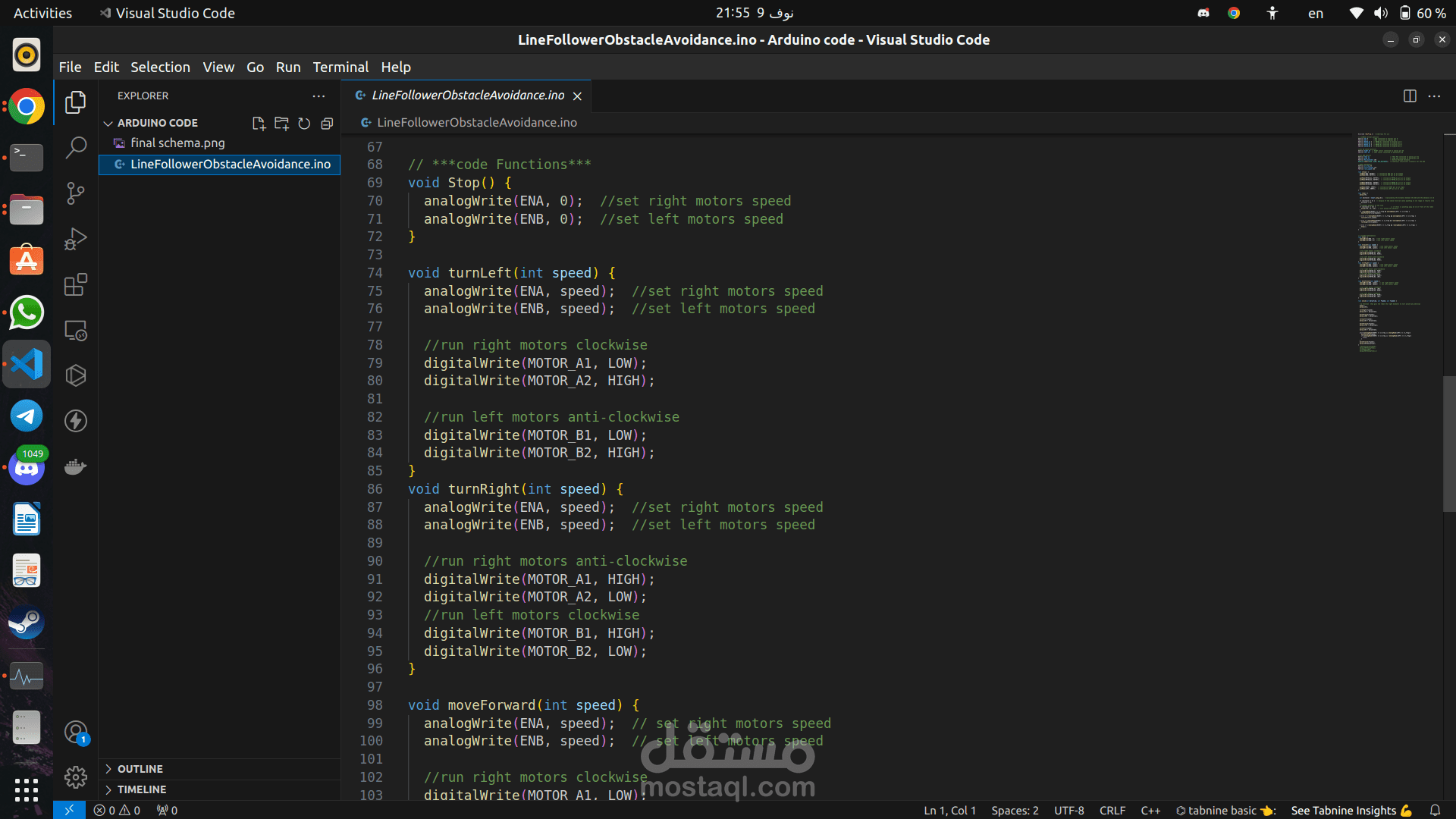
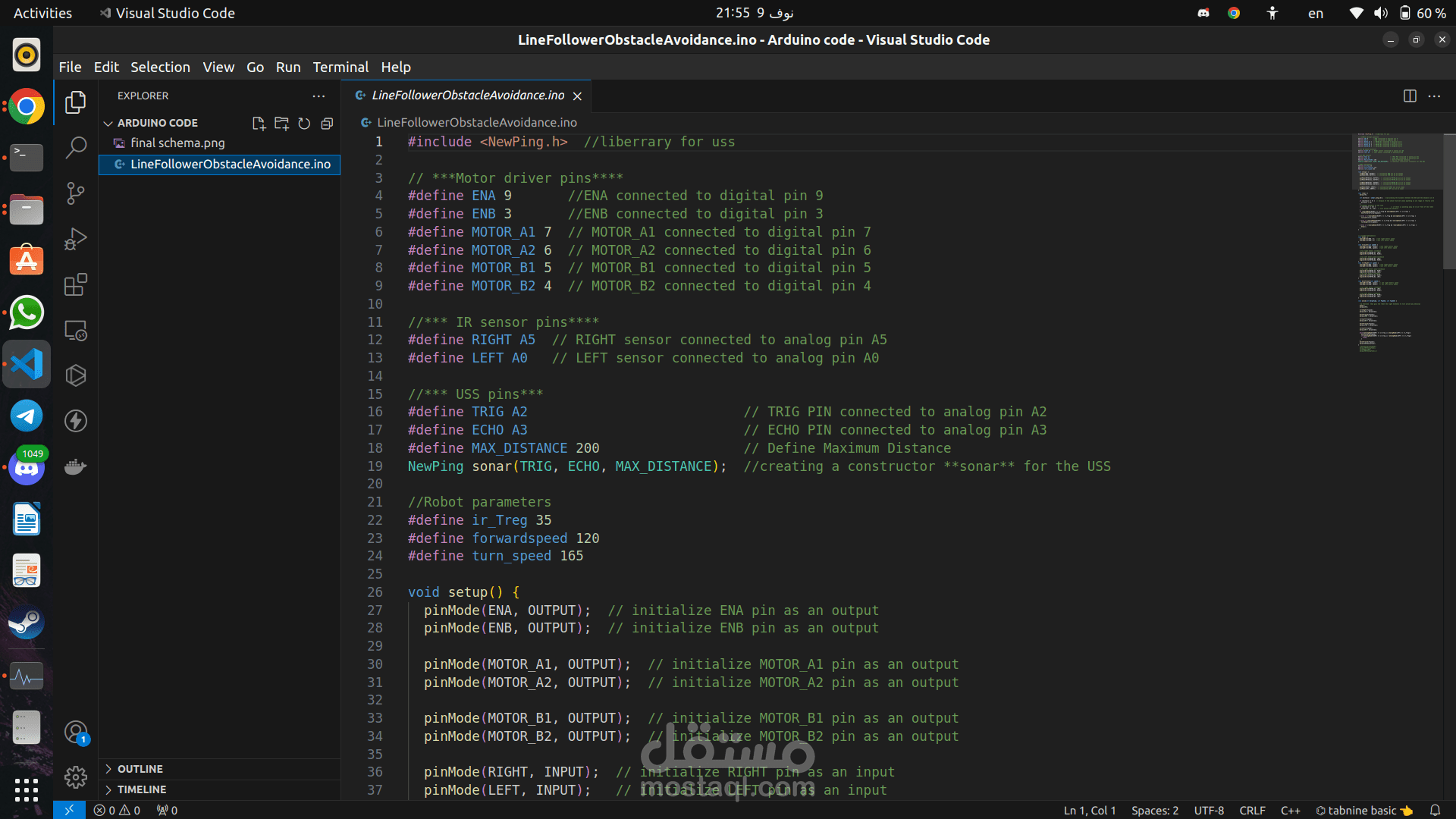
- لغة برمجة اردوينو
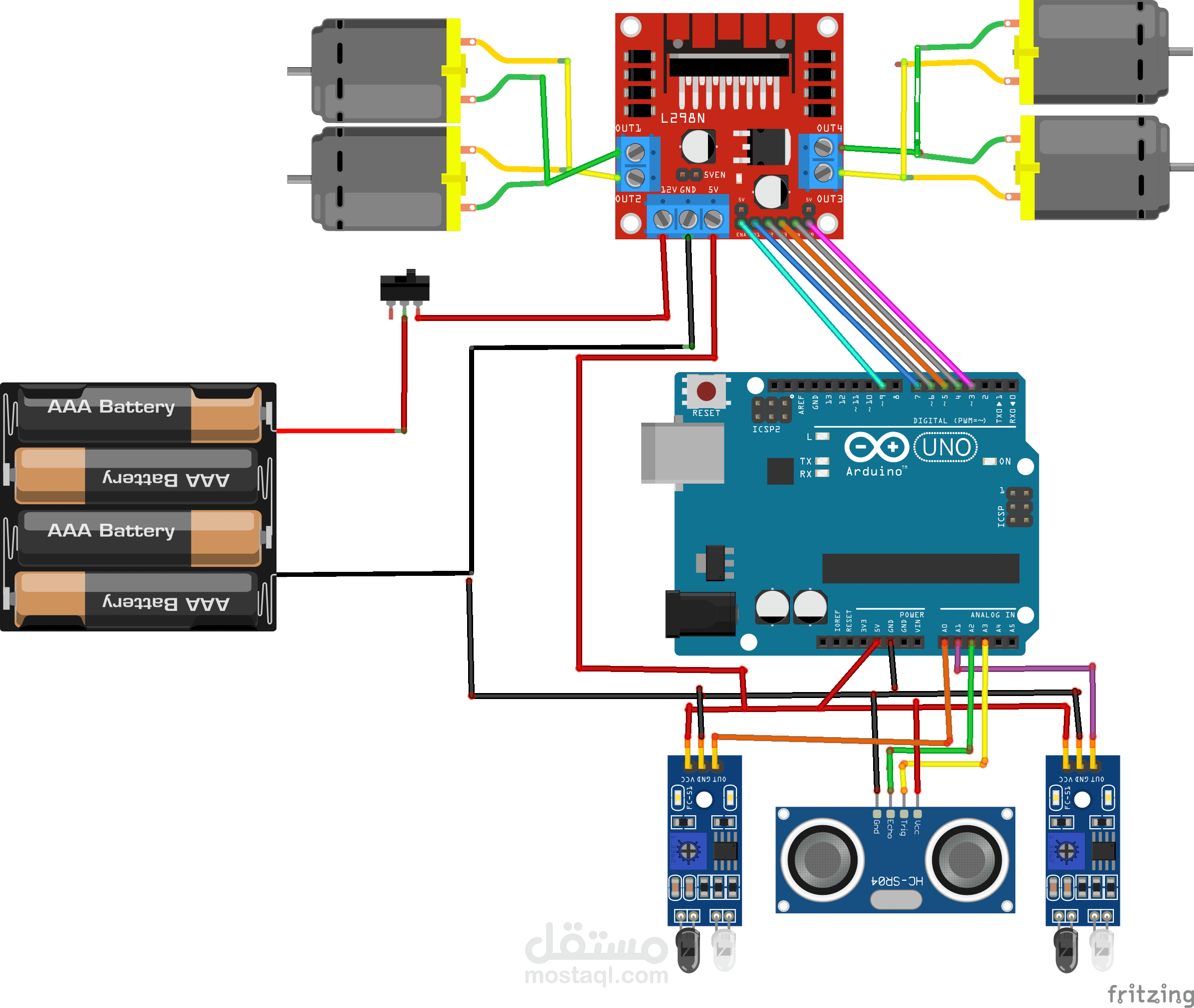
- برنامج fritzing
- Arduino Uno
- sensors like Ultrasonic and infrared
- motors and motor driver
-wires
- wheels