Agriculture robot
تفاصيل العمل

Farmotron – روبوت زراعي ذكي
مشروع تصميم وتنفيذ روبوت زراعي شبه ذاتي، يهدف إلى اكتشاف الخضروات الناضجة وقطفها وفرزها بشكل آلي، لتقليل الوقت والمجهود المبذول في الحصاد اليدوي والحد من الأخطاء وتلف المحاصيل.
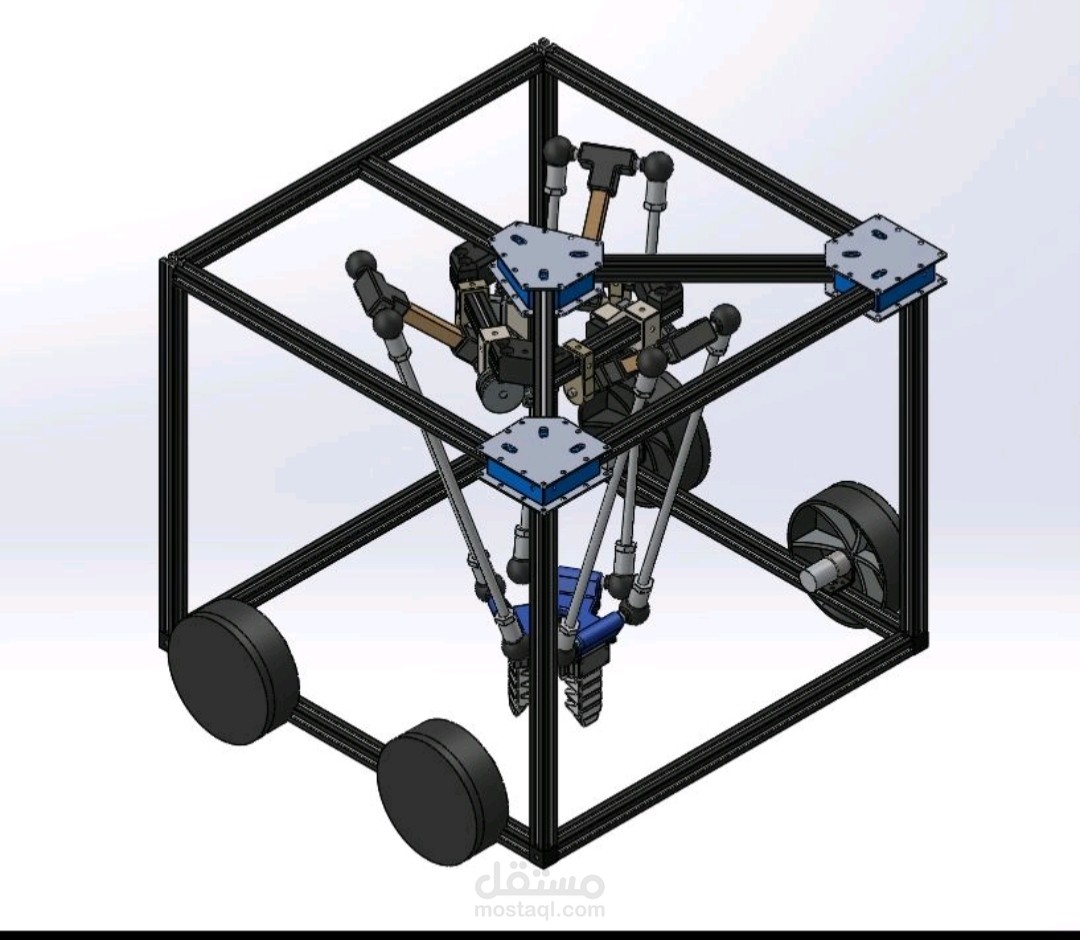
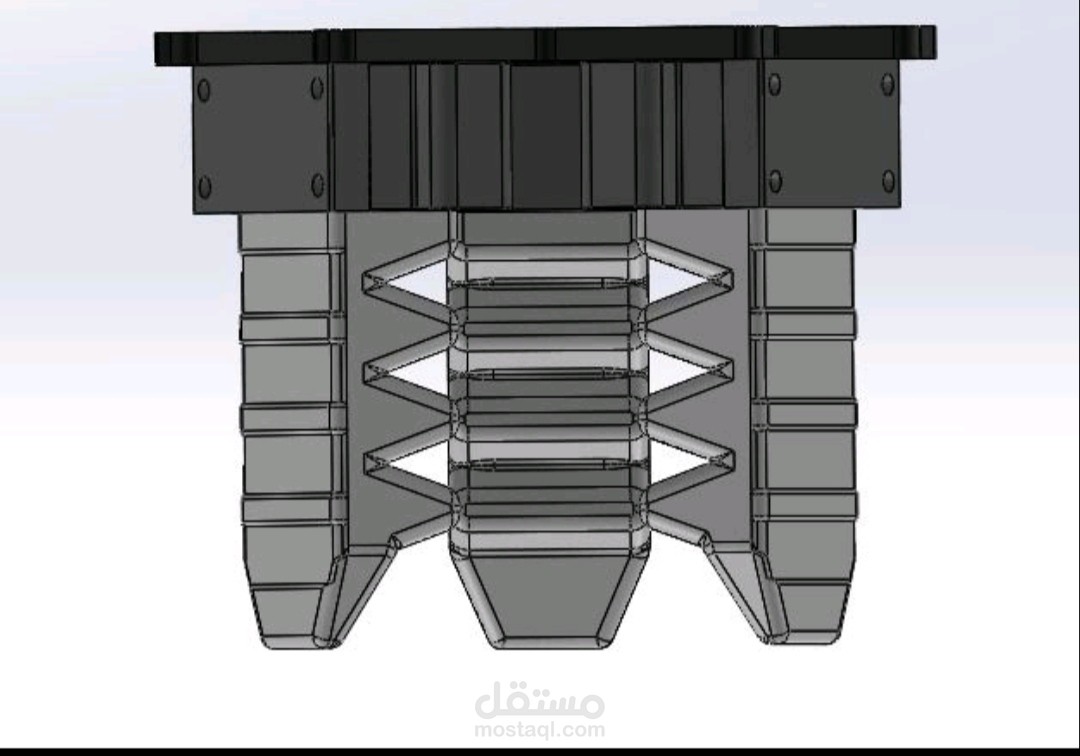
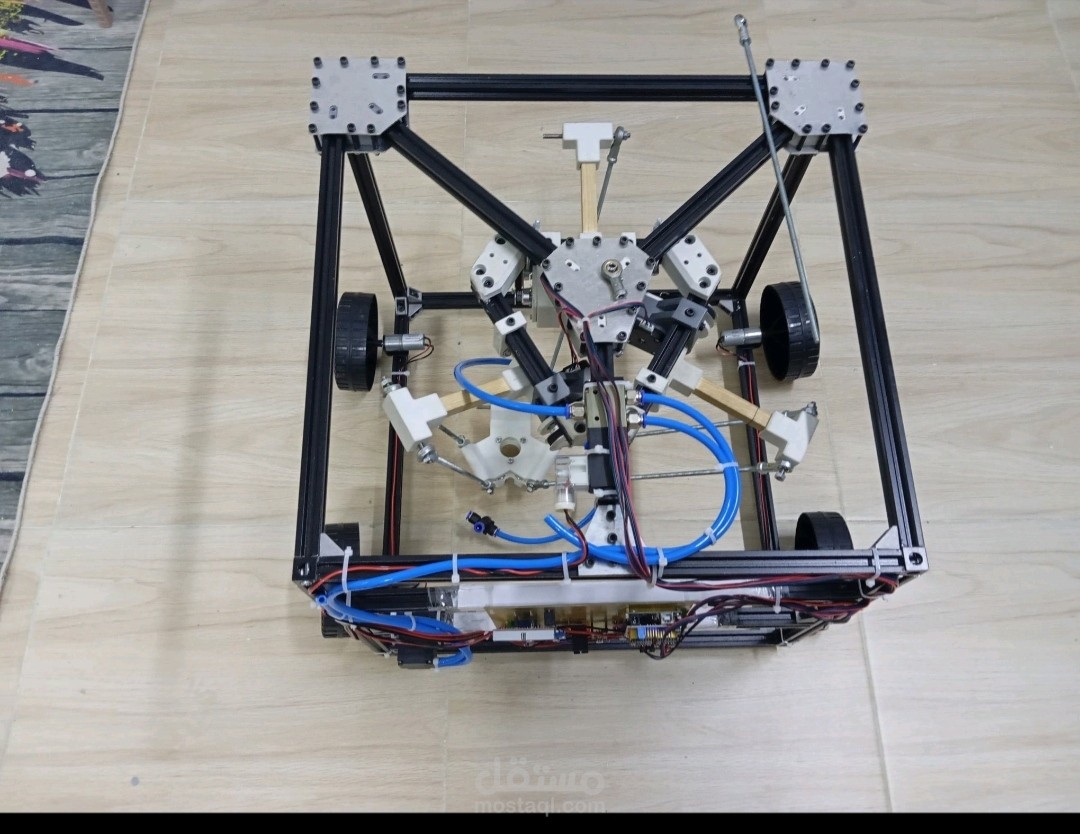
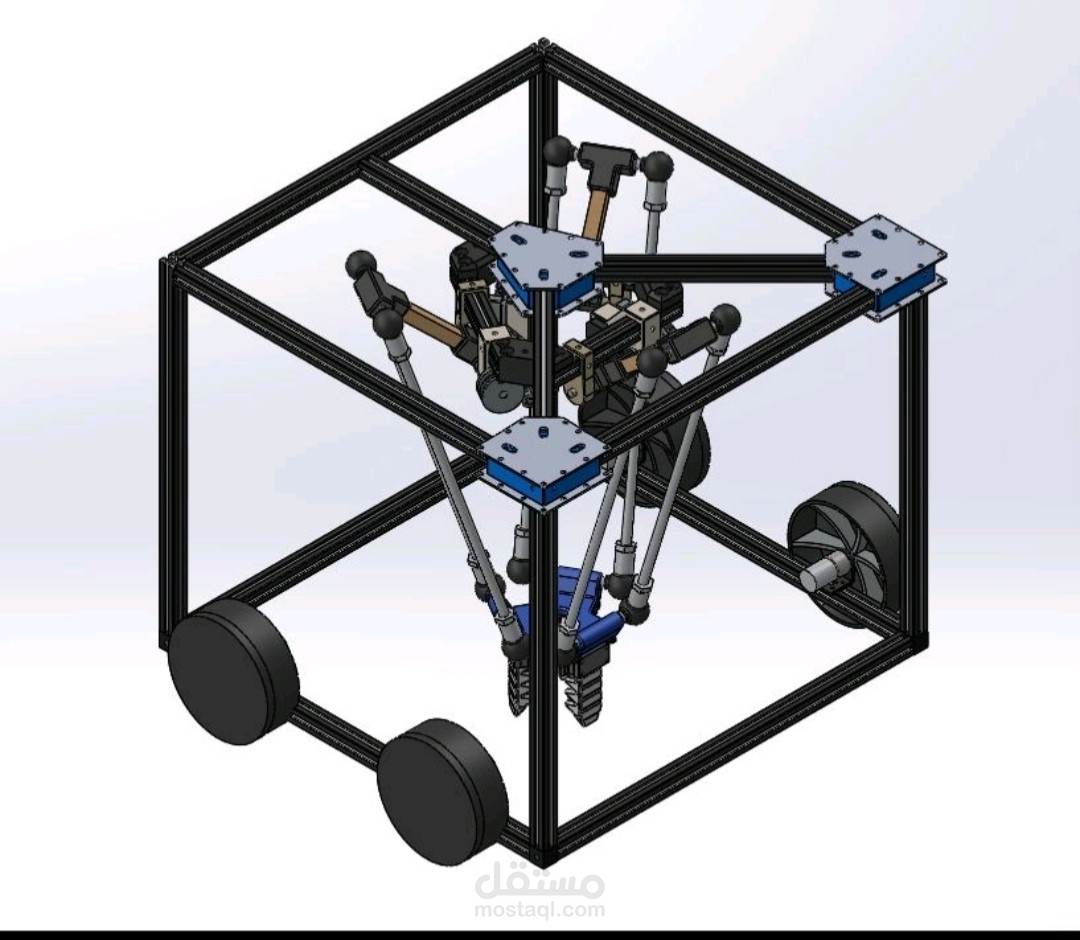
يتكون الروبوت من هيكل خفيف مصنوع من قطاعات الألومنيوم، ونظام حركة رباعي العجلات، بالإضافة إلى ذراع روبوتية من نوع Delta Robot مزودة بنظام شفط هوائي لالتقاط الثمار اللينة مثل الطماطم والفلفل دون إتلافها.
يعتمد النظام على Raspberry Pi وOpenCV لمعالجة صور الكاميرا واكتشاف الثمار وتحديد إحداثياتها، ثم تُرسل الإحداثيات إلى Arduino لتطبيق معادلات الحركة العكسية والتحكم في محركات الذراع ونظام الالتقاط. يستطيع الروبوت فرز ما يصل إلى أربعة أنواع مختلفة من المحاصيل ووضعها في أماكن التخزين المخصصة لها.
شمل العمل في المشروع:
تصميم الهيكل والذراع الروبوتية وتجميع المكونات الميكانيكية.
تصميم وتنفيذ نظام الحركة والتوجيه.
برمجة Inverse Kinematics لذراع الـDelta.
استخدام Arduino، Raspberry Pi، Python وOpenCV.
دمج نظام الرؤية مع أنظمة الحركة والالتقاط.
اختبار النظام عمليًا وتحسين دقة الالتقاط والفرز.