Autonomous mobile robot assisted for material transportation
تفاصيل العمل



Autonomous Mobile Robot for Material Transportation
مشروع تصميم وتنفيذ روبوت متنقل ذاتي الحركة AMR مخصص لنقل ورفع المواد داخل المصانع والمخازن، بهدف تقليل المجهود اليدوي وتحسين كفاءة عمليات المناولة الداخلية.
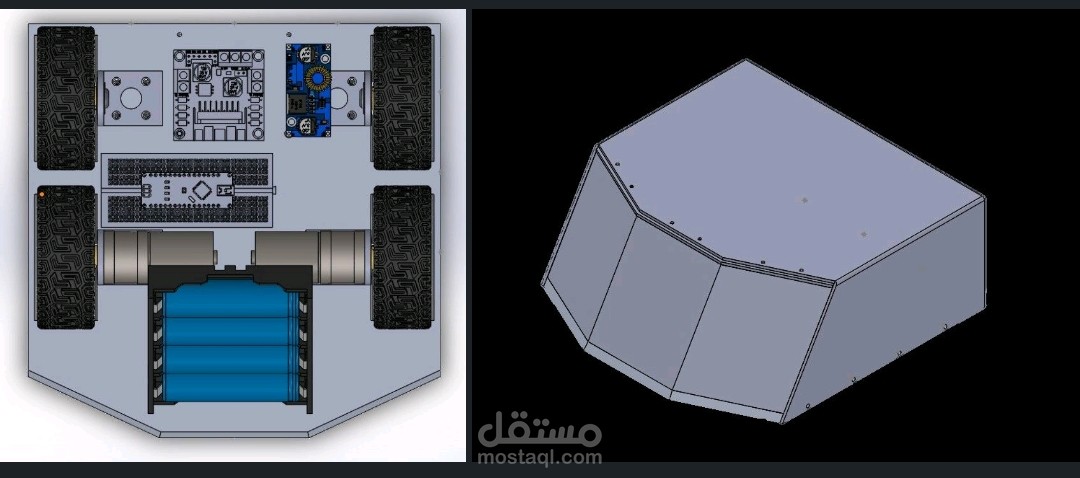
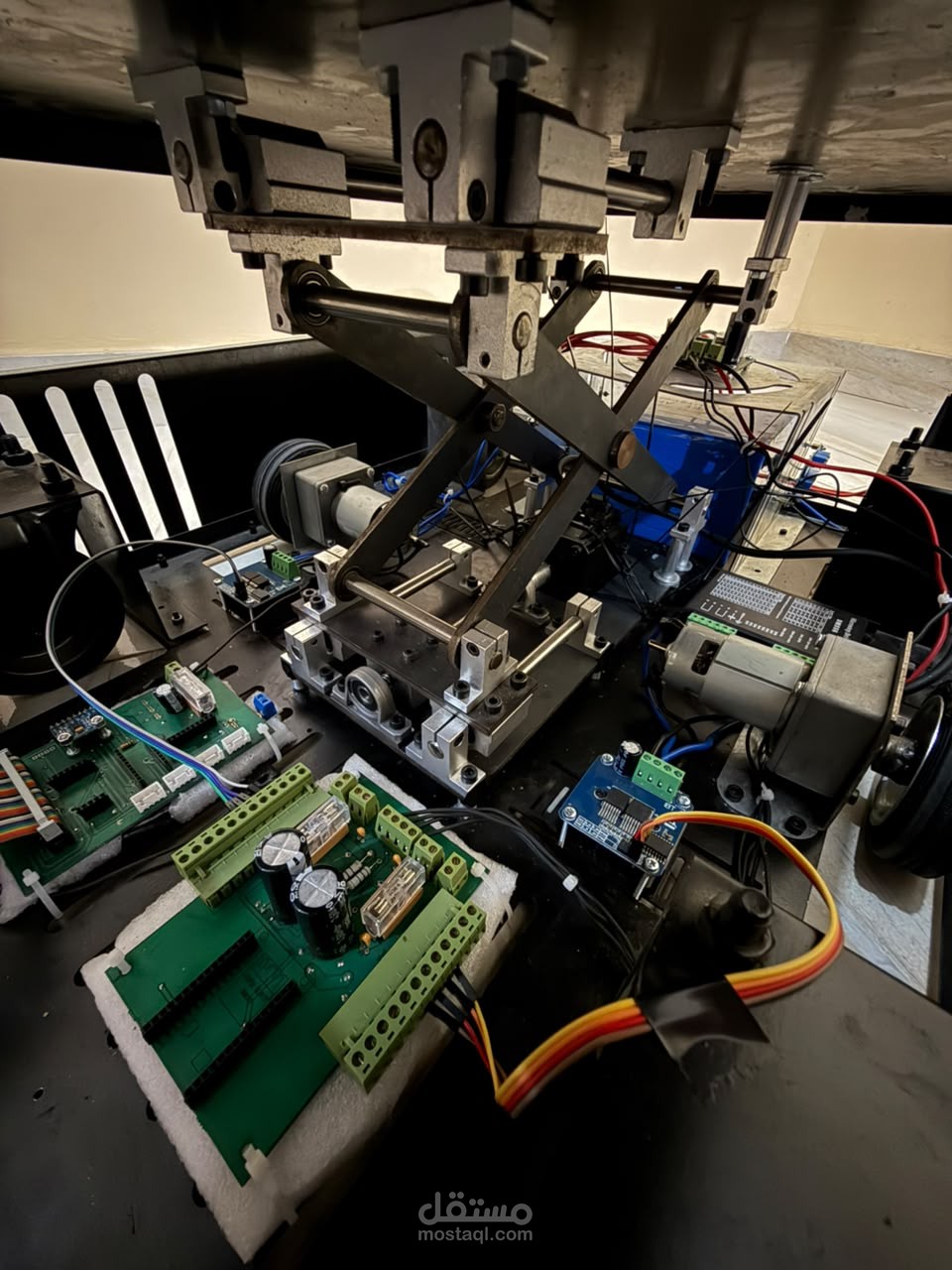
تم تطوير الروبوت كمنصة متحركة بنظام Differential Drive، مزودة بآلية رفع ميكانيكية من نوع Scissor Lift لتحميل ونقل المواد. شمل دوري في المشروع:
التصميم الميكانيكي الكامل باستخدام SolidWorks.
تصميم الشاسيه وآلية الرفع واختيار الخامات والمكونات المناسبة.
إعداد التجميعات والرسومات الهندسية الخاصة بالتصنيع
إجراء الحسابات الهندسية الخاصة بالأحمال، الإجهادات، واختيار المحركات.
الإشراف على مراحل التصنيع والتجميع الميكانيكي.
اختبار الروبوت عمليًا والتحقق من قدرته على الحركة والرفع تحت الأحمال.
بلغت الحمولة التصميمية للروبوت 20 كجم، وتم اختباره عمليًا بحمولة تصل إلى 15 كجم، مع وزن إجمالي تصميمي يقارب 70 كجم.
ساهم المشروع في تطوير خبرتي في Mechanical Design, Manufacturing, Assembly, Design Validation، وحل المشكلات الهندسية العملية.