Robot Arm Control Using MATLAB Graphical User Interface
تفاصيل العمل
هذا المشروع مميز جداً وثقيل تقنياً (Heavyweight Project)، لأنه يمثل قمة الربط بين التصميم الميكانيكي (CAD)، المحاكاة الديناميكية (Simulation)، التحليل الرياضي (Kinematics)، وتطوير واجهات التحكم (GUI). وجود مشروع كهذا في معرض أعمالك على "مستقل" يضعك في فئة المهندسين المحترفين القادرين على بناء "التوأم الرقمي" (Digital Twin) والأنظمة الصناعية المعقدة.
إليك صياغة احترافية ومنظمة لوصف هذا المشروع لتنسخها مباشرة إلى معرض أعمالك:
🤖 محاكاة والتحكم في ذراع روبوت صناعي (ABB IRB 1200) باستخدام MATLAB GUI و SolidWorks
وصف المشروع:
مشروع هندسي متكامل يحاكي بيئة التصنيع الذكي، يهدف إلى تصميم، ومحاكاة، والتحكم في ذراع روبوت صناعي ذو 6 محاور (6-DOF) مستوحى من الروبوت العالمي ABB IRB 1200. يعتمد المشروع على الربط الديناميكي بين بيئة التصميم الميكانيكي وبيئة المحاكاة الرياضية لتوفير تحكم كامل وحساب حركة الروبوت بدقة متناهية عبر واجهة مستخدم رسومية (GUI).
⚙️ مراحل تنفيذ ومكونات المشروع:
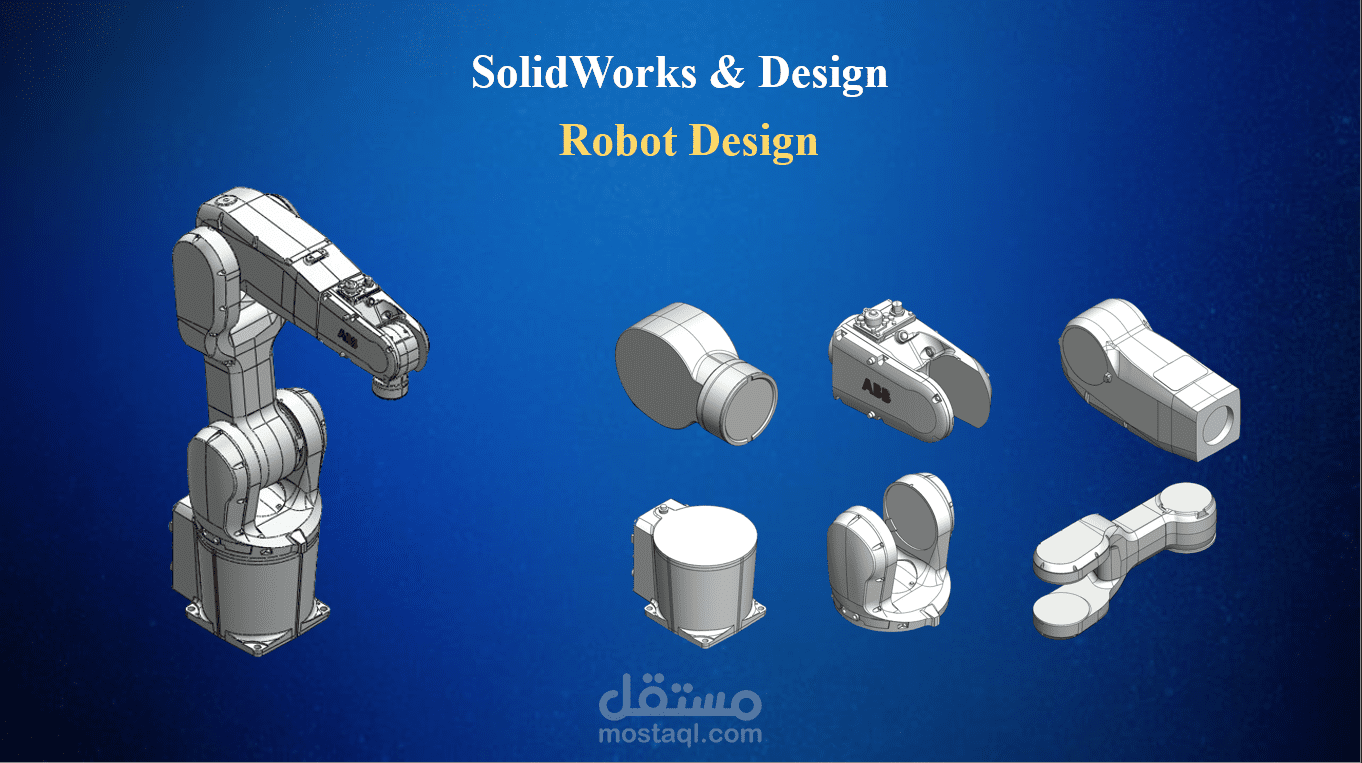
1. النمذجة والتصميم الميكانيكي (3D CAD Modeling):
تصميم الأجزاء الميكانيكية المعقدة للروبوت وتجميعها (Assembly) بدقة عالية باستخدام برنامج SOLIDWORKS، مع مراعاة الأبعاد الهندسية الحقيقية ومفاصل الحركة.
2. بيئة المحاكاة واستيراد النموذج (Simscape Multibody):
تصدير النموذج الميكانيكي بالكامل من SolidWorks إلى بيئة MATLAB/Simulink باستخدام أداة Simscape Multibody عبر دالة smimport.
تتيح هذه المرحلة محاكاة حركة الروبوت الفيزيائية (الكتلة، العزم، الاحتكاك، ومراكز الثقل) في بيئة افتراضية دون الحاجة لبناء روبوت حقيقي مكلف.
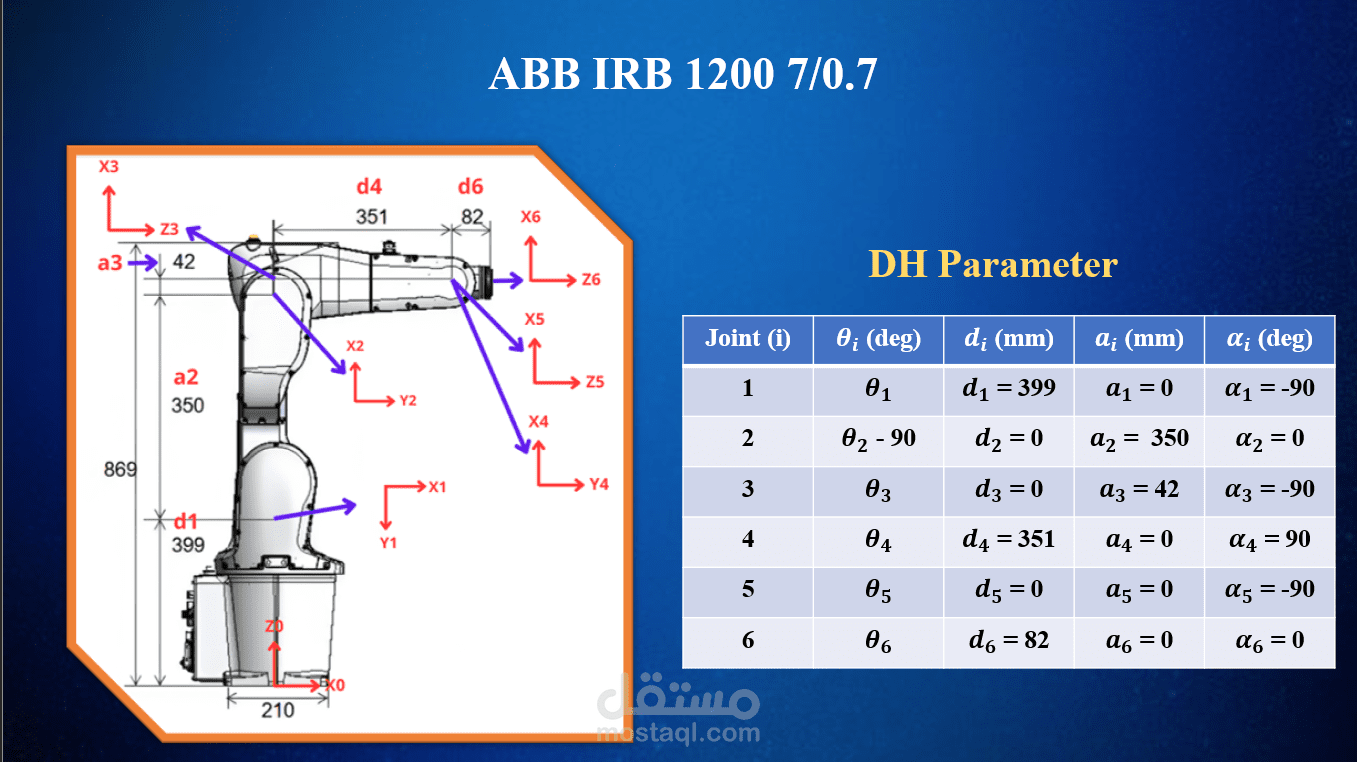
3. الحسابات الرياضية وحركة الروبوت (Forward Kinematics):
استنتاج المعادلات الرياضية والمصفوفات (Matrices) الخاصة بـ Forward Kinematics لتحديد موضع ونقطة نهاية الروبوت (End-Effector) في الفراغ بناءً على زوايا المفاصل (Joint Angles).
اختبار ومقارنة نتائج الحسابات الرياضية النظرية مع نتائج المحاكاة الفعلية لضمان أعلى دقة.
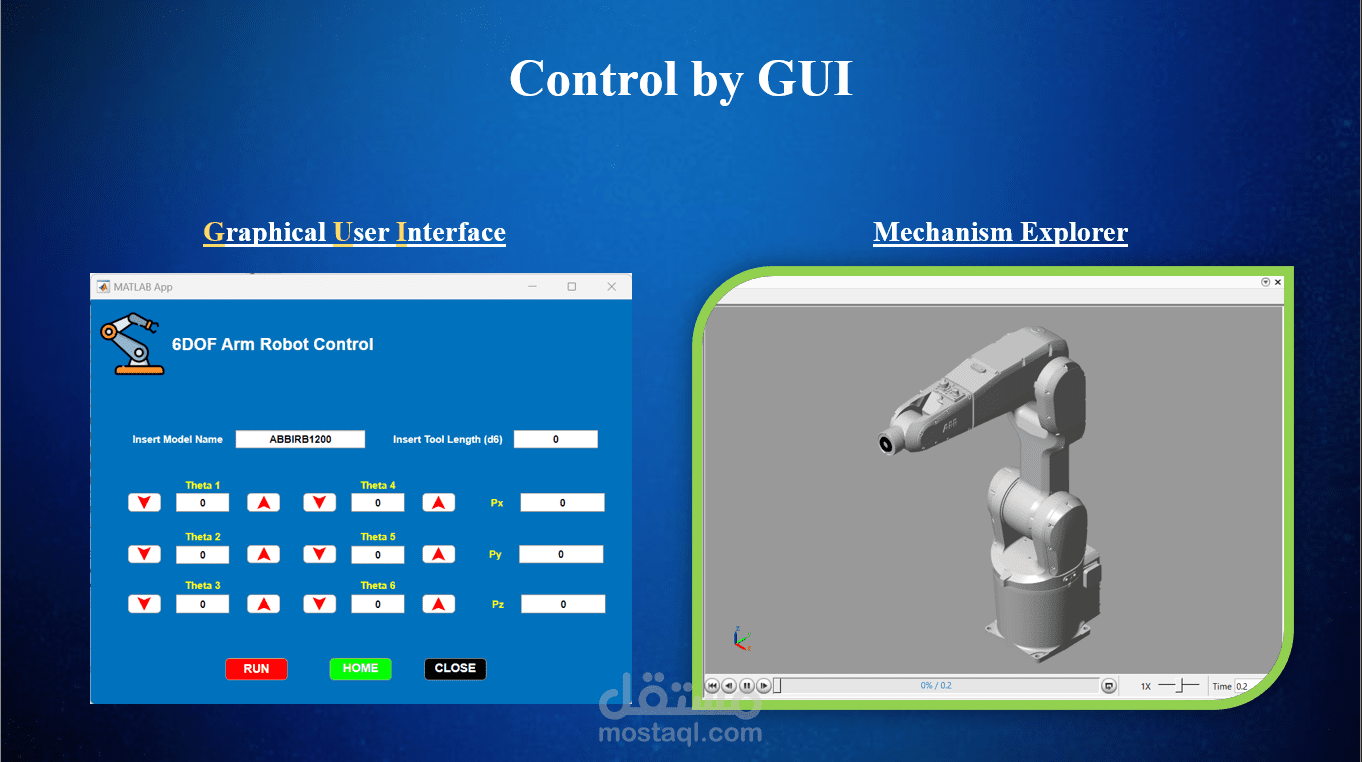
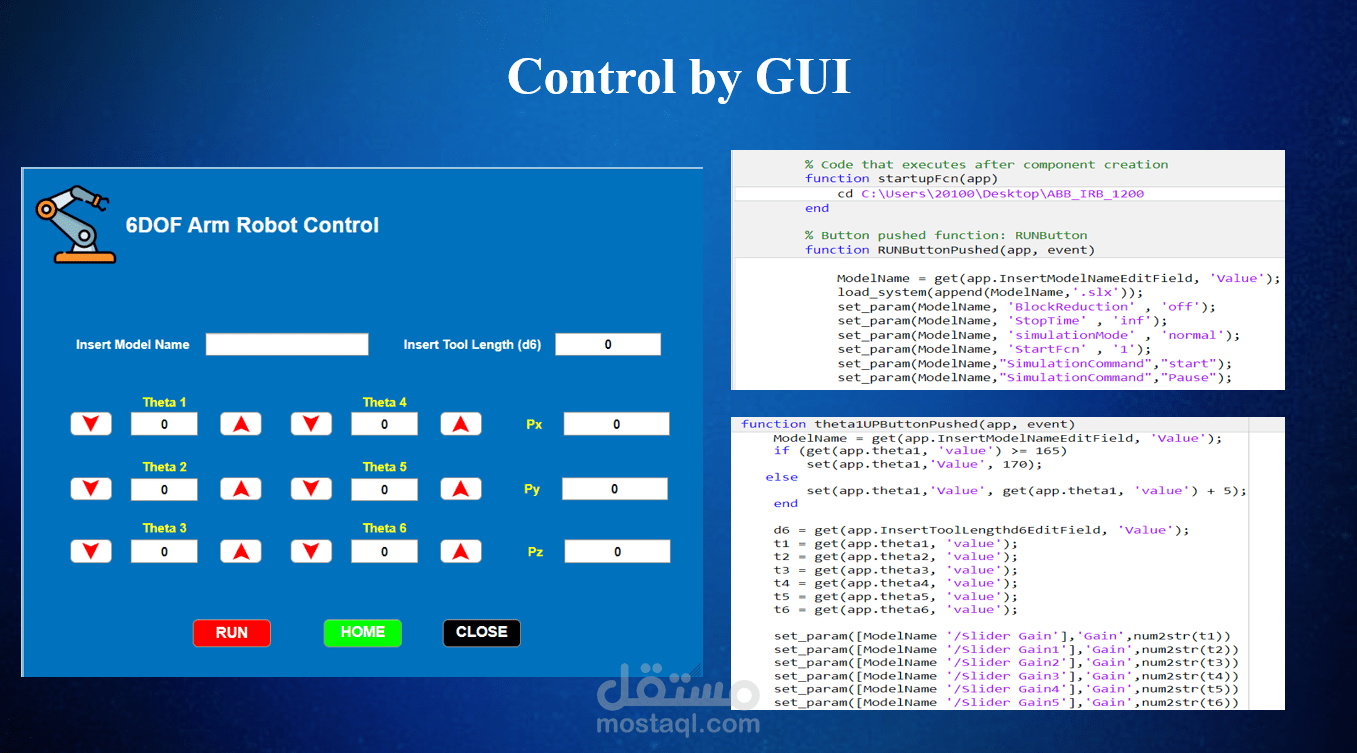
4. تطوير واجهة التحكم الرسومية (MATLAB App Designer):
تصميم واجهة مستخدم احترافية وتفاعلية بالكامل باستخدام App Designer داخل MATLAB.
تتيح الواجهة للمستخدم (عبر محددات الحركة Sliders وحقول الإدخال Edit Fields):
التحكم اللحظي في زوايا مفاصل الروبوت (Revolute Joints).
عرض الإحداثيات والمواقع اللحظية للروبوت أثناء الحركة.
🛠️ المهارات والتقنيات المستخدمة:
برامج التصميم والمحاكاة: SOLIDWORKS, MATLAB, Simulink.
الأدوات المتخصصة: Simscape Multibody, MATLAB App Designer, Robotics System Toolbox.
العلوم الهندسية: الروبوتات الصناعية (Industrial Robotics)، كينماتيكا الروبوت (Forward Kinematics)، الأنظمة المدمجة والمحاكاة الافتراضية.
💡 القيمة المضافة للعملاء (لماذا توظفني لهذا النوع من المشاريع؟):
القدرة على بناء التوائم الرقمية (Digital Twins) للآلات والمصانع قبل البدء في مرحلة التصنيع الفعلي، مما يوفر آلاف الدولارات في تجنب أخطاء التصميم.
مهارة متقدمة في كتابة خوارزميات الحركة والتحكم الرياضي المعقد للروبوتات والمعدات الذكية.
تصميم واجهات تحكم مخصصة وسهلة الاستخدام للمشغلين والفنيين.