Master for 5 DoF Robot
تفاصيل العمل
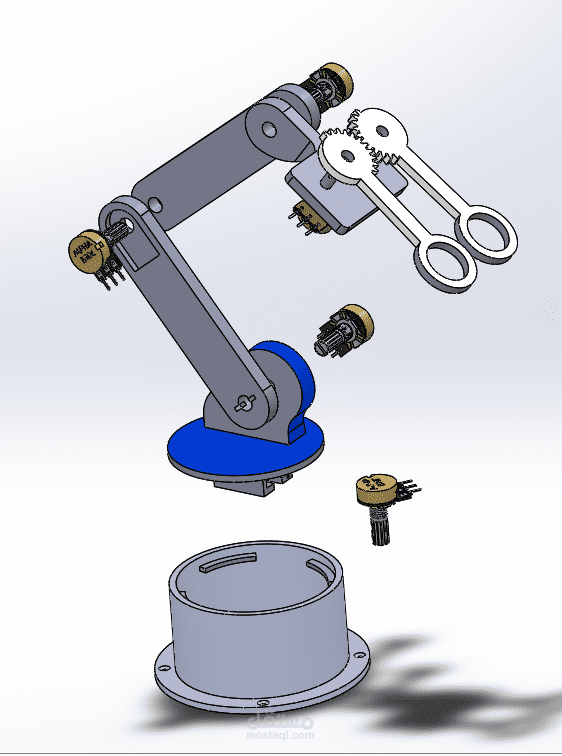
قمت بتنفيذ Slave Robot Arm يحتوى على 5 محاور حركة بحيث يكون هو المتحكم في ال Slave Robot Arm عن طريق 2 Modes
Mode 1 وهو يحاكي الحركة اللحظية للروبوت real time
Mode 2 حيث يتم تسجيل 4 وضعيات عن طريق ال Master يوم ال Slave بتنفيذها بالترتيب وبدقة