RTOS- Smart Car
تفاصيل العمل



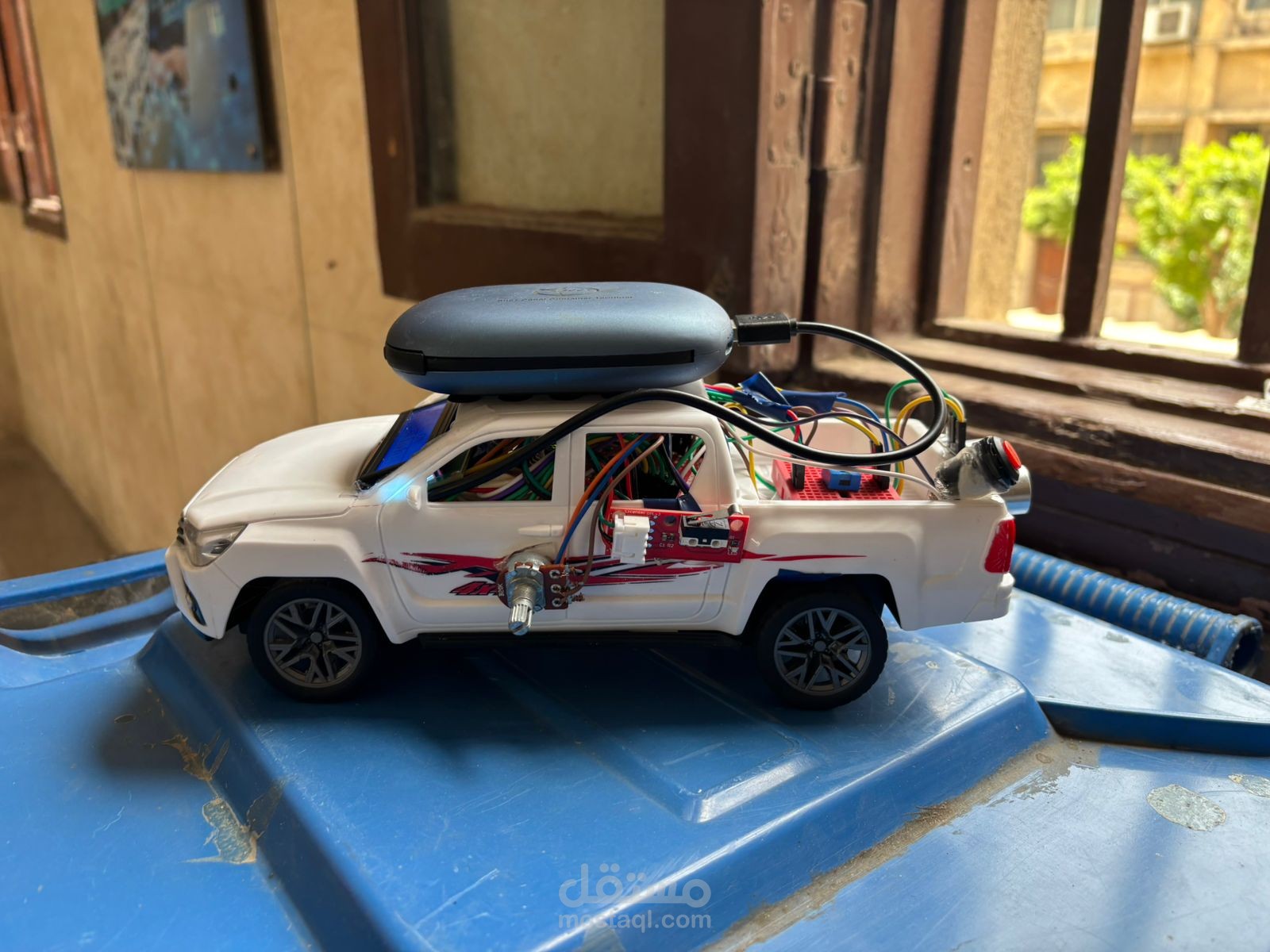
المشروع: RTOS-smartCar
التقنيات المستخدمة: نظام تشغيل في الوقت الفعلي (RTOS) باستخدام FreeRTOS، مع ميكروكونترولر TM4C123GH6PM من Texas Instruments، وأدوات التطوير Keil uVision.
الوصف:
هذا المشروع يتعلق بتطوير نظام ذكي لسيارة ذاتية التحكم (Smart Car) باستخدام نظام تشغيل في الوقت الفعلي. يعتمد على FreeRTOS لإدارة المهام المتعددة في الوقت الفعلي، مثل التحكم في المحركات، معالجة البيانات من المستشعرات، وإدارة الأحداث والطوابير (Queues) والمجموعات الحدثية (Event Groups) والمؤقتات (Timers). يشمل الكود ملفات مثل main.c للتحكم الرئيسي، بالإضافة إلى مكونات CMSIS OS2 للتكامل مع العتاد.
الهدف: بناء نظام مضمن يدعم التشغيل المتعدد المهام لسيارة ذكية، مع التركيز على الكفاءة والاستجابة السريعة في بيئات الوقت الحقيقي.
المهارات المكتسبة: برمجة مضمنة، إدارة RTOS، تصميم أنظمة في الوقت الفعلي، وتطوير تطبيقات IoT/Embedded.
هذا المشروع مثالي لعرض خبرتي في تطوير الأنظمة المضمنة والسيارات الذكية على منصة مستقل. يمكن تخصيصه حسب الاحتياجات.