Compact ESP Dev Board shield PCB
تفاصيل العمل
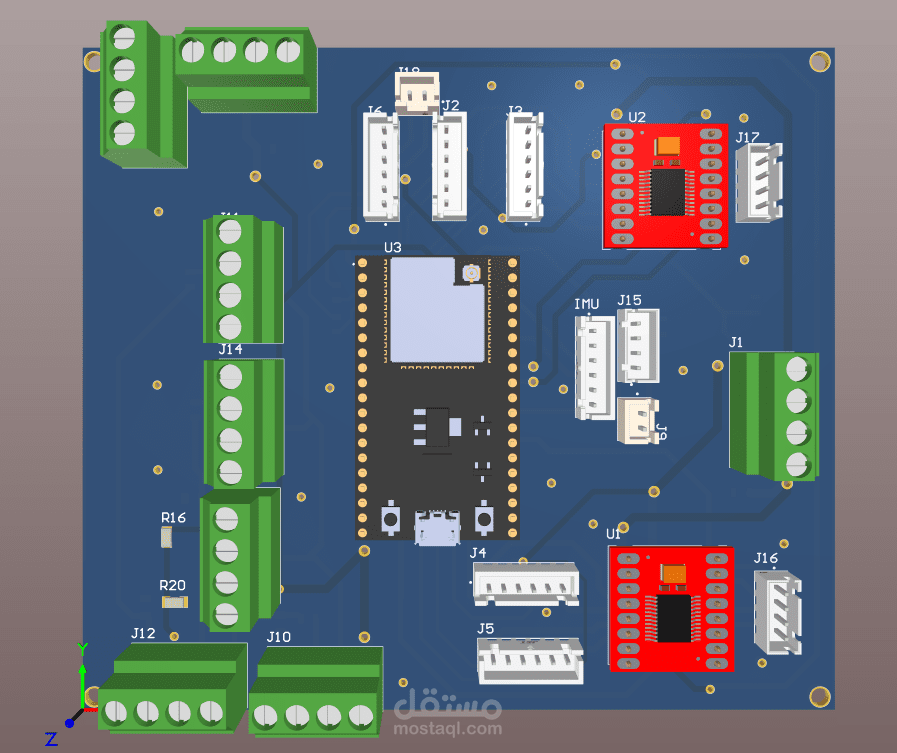
تصميم لوحة PCB ثنائية الطبقات للتحكم في روبوت باستخدام ESP32 ومحركات DC وحساسات Ultrasonic
قمت بتصميم لوحة PCB ثنائية الطبقات مخصصة للتحكم في نظام روبوتي يعتمد على متحكم ESP32، مع واجهات منظمة لتوصيل المحركات، الحساسات، ووحدات القياس المستخدمة في المشروع.
تحتوي اللوحة على درايفرين لمحركات DC، حيث يستطيع كل درايفر التحكم في محركين، مما يسمح بالتحكم في 4 محركات DC من خلال لوحة واحدة. كما تم توفير موصلات متعددة للحساسات الطرفية، مع تنظيم التوصيلات لتقليل الأسلاك العشوائية وتسهيل عملية التركيب والصيانة.
تمت إضافة دوائر Voltage Divider لإشارات الـ Echo الخاصة بحساسات الموجات فوق الصوتية Ultrasonic Sensors، وذلك لخفض مستوى الإشارة من 5V إلى 3.3V حتى تكون متوافقة وآمنة مع Raspberry Pi أو أي متحكم يعمل بمنطق 3.3V. كما تحتوي اللوحة على موصل JST مخصص لتوصيل وحدة IMU بشكل مرتب وسهل.
مكونات ومميزات المشروع:
تصميم PCB ثنائي الطبقات.
استخدام ESP32 كوحدة تحكم رئيسية.
دعم 2 DC motor drivers.
كل درايفر يتحكم في محركين، بإجمالي 4 محركات DC.
واجهات توصيل منظمة للمحركات والحساسات.
دوائر Voltage Divider لإشارات Echo الخاصة بحساسات Ultrasonic.
تحويل إشارات Echo من 5V إلى 3.3V للتوافق مع Raspberry Pi.
موصل JST مخصص لوحدة IMU.
استخدام موصلات Screw Terminal وJST لتسهيل التوصيل والفصل.