Autonomous Vacuum Robot
تفاصيل العمل
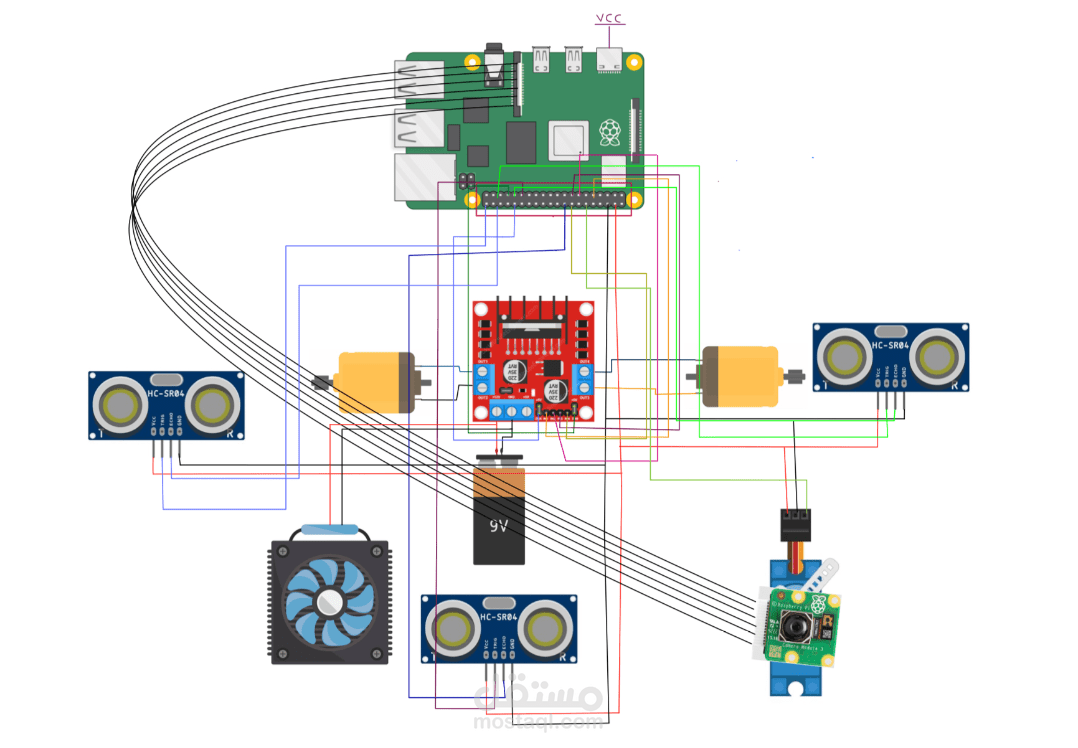
قمت بتطوير روبوت تنظيف ذاتي (Autonomous Vacuum Robot) يعمل بشكل مستقل باستخدام Raspberry Pi، حيث تم تصميم النظام ليتحرك داخل مساحة محددة ويقوم بعملية التنظيف دون أي تدخل بشري.
يعتمد المشروع على دمج عدة مكونات عتادية وبرمجية، حيث يتم التحكم في الروبوت باستخدام Raspberry Pi مع استخدام محركات DC ونظام قيادة Differential Drive للتحكم بالحركة. تم استخدام حساسات Ultrasonic لقياس المسافات واكتشاف العوائق في الوقت الحقيقي، مما يسمح للروبوت بتجنب الاصطدام أثناء الحركة.
تم تصميم النظام باستخدام مفهوم Finite State Machine (FSM) لتنظيم حالات الروبوت مثل:
الحركة للأمام، التوقف، الانعطاف، وتجنب العوائق، مما يجعل سلوك الروبوت منظم وسهل التحكم والتطوير