Self-Driving Robot
تفاصيل العمل
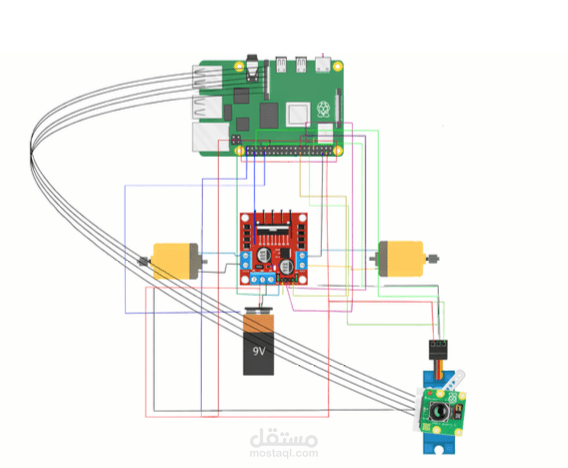
قمت بتطوير نظام قيادة ذاتية مصغر (Self-Driving Robot) باستخدام Raspberry Pi وتقنيات الرؤية الحاسوبية (Computer Vision) للتحكم في حركة الروبوت داخل المسار بشكل ذكي.
يعتمد المشروع على تحليل الفيديو في الوقت الحقيقي باستخدام OpenCV، حيث يتم تحويل الصورة إلى نظام HSV لعزل الطريق الرمادي، ثم حساب مركز المسار (Centroid) لتحديد مقدار الانحراف عن منتصف الطريق. بعد ذلك يتم استخدام خوارزمية تحكم من نوع PD Controller لتصحيح الاتجاه بشكل سلس وتقليل الاهتزاز أثناء الحركة.
تم التحكم في حركة الروبوت باستخدام نظام Differential Drive، حيث يتم ضبط سرعة المحركات عن طريق إشارات PWM لتحقيق التوجيه المطلوب بدون الحاجة إلى نظام توجيه ميكانيكي.
كما يتضمن المشروع مفهوم Most Important Object (MIO)، والذي يعتمد على اكتشاف أقرب عائق داخل المسار فقط، مع تجاهل العوائق خارج المسار. عند اكتشاف العائق، يتوقف الروبوت بشكل آمن، ثم يستأنف الحركة تلقائيًا بعد إزالة العائق.
النظام يعمل في الوقت الحقيقي على Raspberry Pi، وقد تم اختباره على مسار يحتوي على خطوط مستقيمة ومنحنيات ومنعطفات حادة، وأظهر أداءً مستقرًا مع دقة جيدة في تتبع المسار واستجابة سلسة لحالات الانحراف.
هذا المشروع يعكس خبرة عملية في مجالات الأنظمة المدمجة، الرؤية الحاسوبية، التحكم، والروبوتات، مع القدرة على دمج البرمجيات مع العتاد لبناء نظام ذكي يعمل في بيئة واقعية.