P2P Computer Vision AI model
تفاصيل العمل
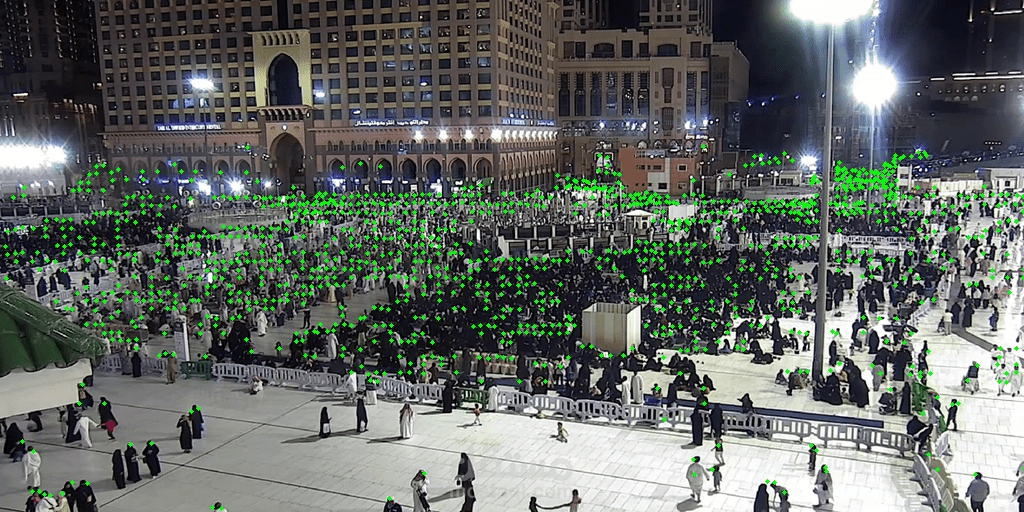
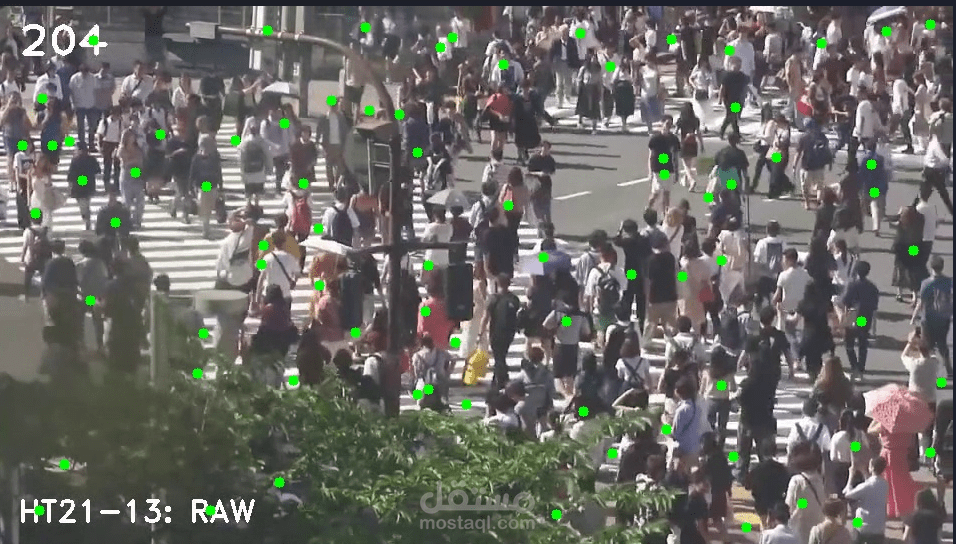
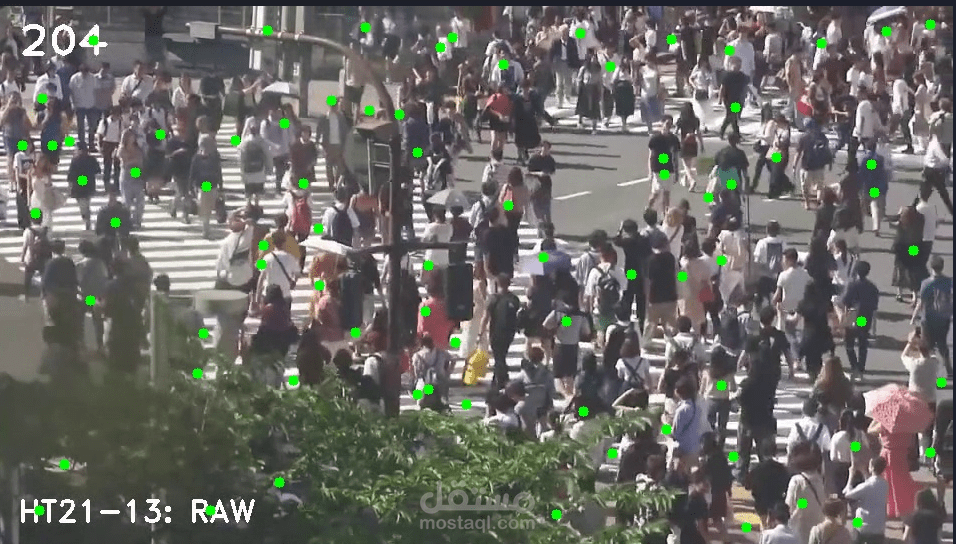
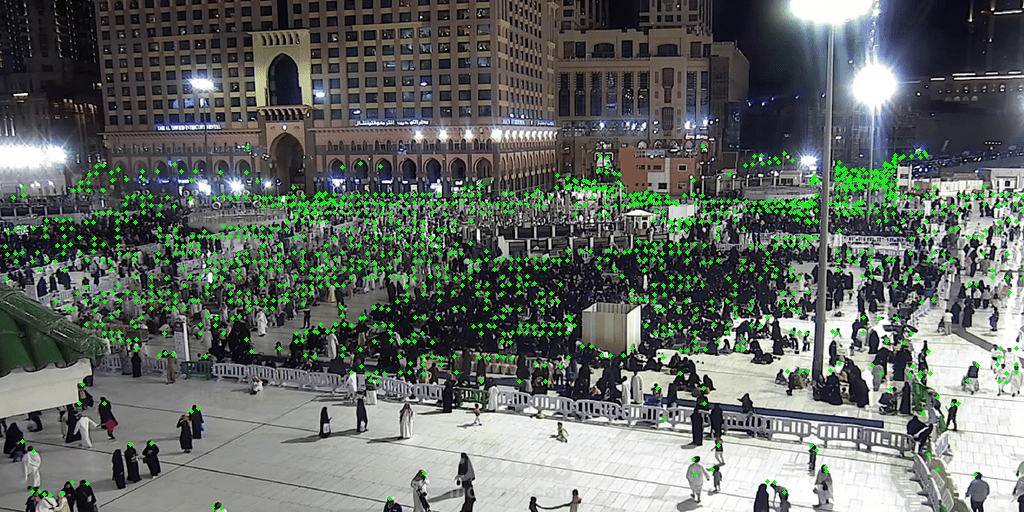
نموذج رؤية حاسبيوة متقدم باستخدام تقنيات الـ P2P
التفاصيل التقنية المستخدمة في النموذج :
1. Technical Methodology and Mathematical Framework
1.1 Enhanced Multi-Threshold Detection System
To increase sensitivity across confidence levels, I introduced a multi-threshold detection cascade.
Multi-Threshold Detection Mathematics
D_final = ⋃{ D_t | t ∈ T }
T = {0.5, 0.3, 0.2, 0.1, 0.05}
D_t = { (x, y) | confidence(x, y) > t }
Enhanced Confidence Scoring
confidence_enhanced(x, y) = softmax(logits(x, y)) * spatial_weight(x, y)
This cascade captures detections at multiple confidence levels, reducing false negatives while preserving precision via intelligent post-processing.
1.2 DBSCAN-Based Crowd Density Analysis
In line with your recommendation to incorporate area-based calculations, I integrated DBSCAN clustering for crowd distribution analysis.
DBSCAN Mathematical Framework
DBSCAN(P, ε = 30, minPts = 3) → { C1, C2, …, Ck, N }
density(Ci) = |Ci| / area(convex_hull(Ci))
Enhancement Point Calculation
enhancement_points(Ci) = max(0, expected_count(Ci) − |Ci|)
expected_count(Ci) = density_baseline * area(Ci)
1.3 Gaussian Density Mapping
Density Map Generation
(x, y) = Σ_i G(x − x_i, y − y_i)G(x, y) = (1 / (2πσ²)) * exp(−(x² + y²) / (2σ²))
2. Implementation Architecture
2.1 Core Algorithm Implementation
Multi-Threshold Detection
multi_threshold_detection(self, outputs_scores, outputs_points):
thresholds = [0.5, 0.3, 0.2, 0.1, 0.05]
detections = {}
for threshold in thresholds:
mask = outputs_scores > threshold
points = outputs_points[mask].detach().cpu().numpy()
detections[threshold] = points.tolist()
return detections
DBSCAN Enhancement Integration
density_based_enhancement(self, points, img_shape):
clustering = DBSCAN(eps=30, min_samples=3).fit(points)
enhanced_points = self._apply_cluster_enhancement(points, clustering.labels_)
return enhanced_points
References
[1] Song, Q., et al. (2021). Rethinking Counting and Localization in Crowds: A Purely Point-Based Framework. ICCV.
[2] Ester, M., et al. (1996). A density-based algorithm for discovering clusters in large spatial databases with noise. KDD.