تصميم نظام التوجيه (Steering System) لسيارة Shell Eco-Marathon – فئة Urban Concept
تفاصيل العمل
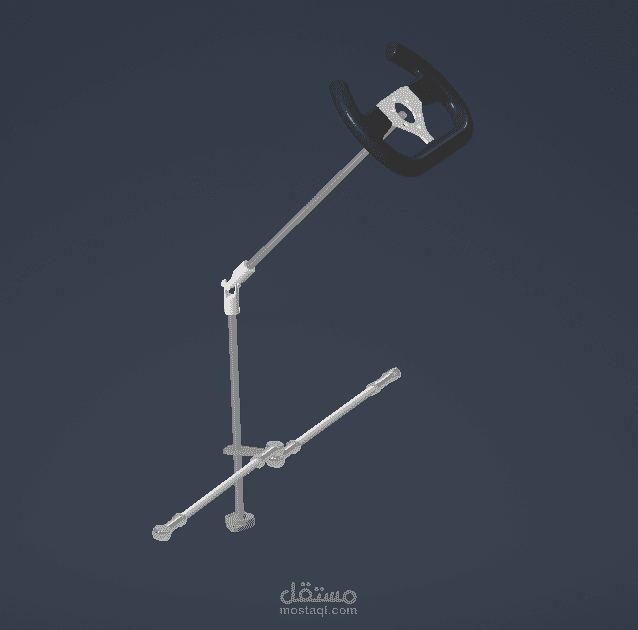
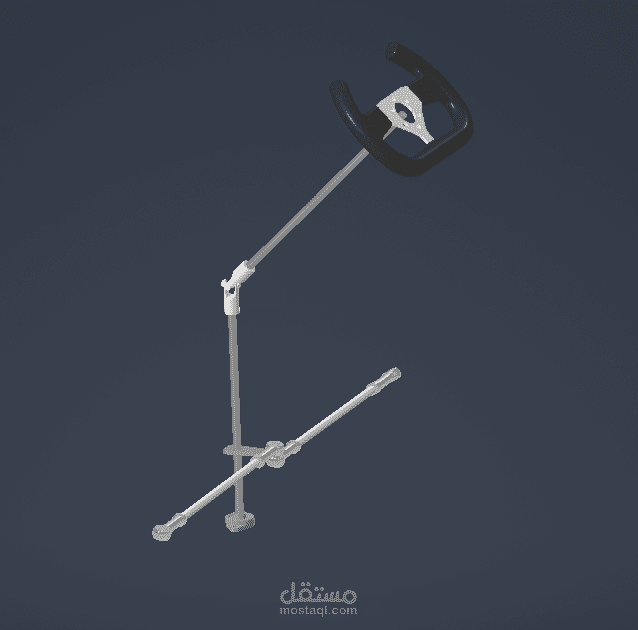
تم في هذا المشروع تصميم نظام توجيه متكامل لسيارة Shell Eco-Marathon من فئة Urban Concept، مع التركيز على تحقيق أعلى كفاءة في الاستجابة والتحكم مع أدنى قدر ممكن من الوزن.
اعتمد التصميم على آليتين هندسيتين أساسيتين:
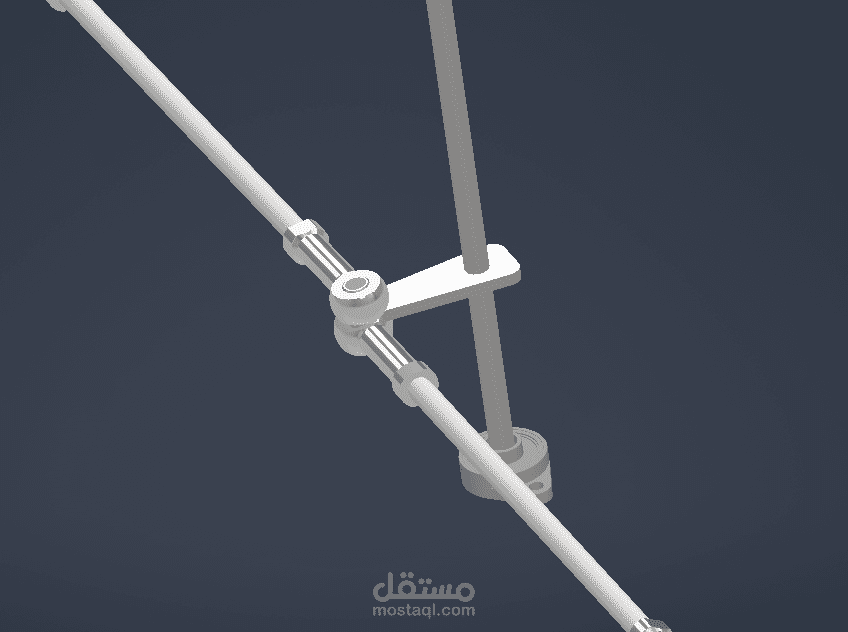
أولاً: آلية Bell Crank Rocker
- تم توظيف هذه الآلية لتحويل حركة عمود التوجيه إلى حركة أفقية منقولة إلى مقاود العجلات
- تم تحديد أبعاد الذراعين والمحور الدوار بدقة لضمان نسبة تحويل مناسبة بين زاوية المقود وزاوية انعطاف العجلة
- تم تصميم المكونات لتكون خفيفة الوزن مع تحمل الأحمال الجانبية أثناء المنعطفات
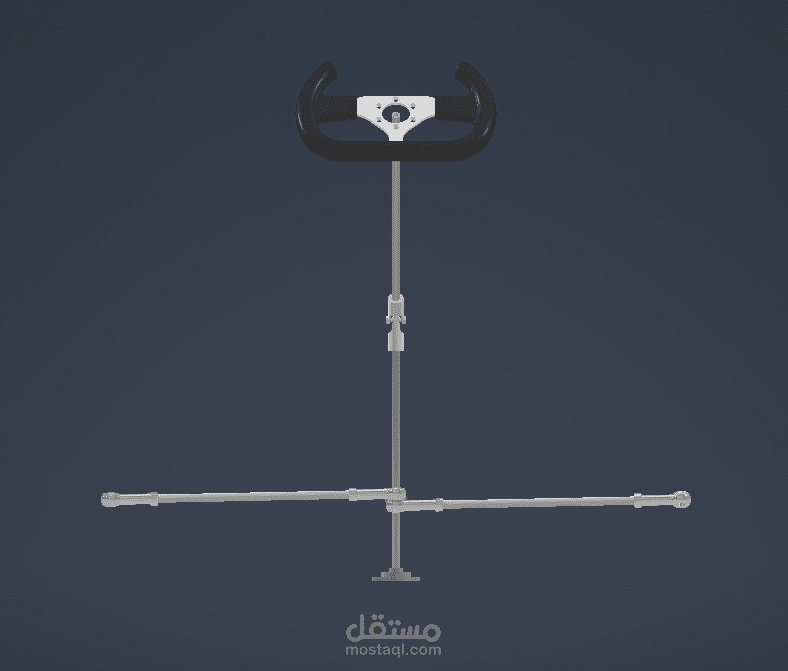
ثانياً: هندسة أكرمان (Ackermann Geometry)
- تم تطبيق مبدأ أكرمان لضمان أن كل عجلة تتبع مسارها الدائري الصحيح عند الانعطاف دون انزلاق
- تم حساب الزوايا الهندسية للمقاود (Tie Rods) ونقاط الارتكاز لتحقيق نسبة أكرمان مثالية تتناسب مع قاعدة العجلات وعرض المحور
- تم التحقق من الهندسة عبر المحاكاة قبل إعداد الرسومات النهائية