Autonomous Navigation & Visual-LiDAR SLAM System using ROS2
تفاصيل العمل

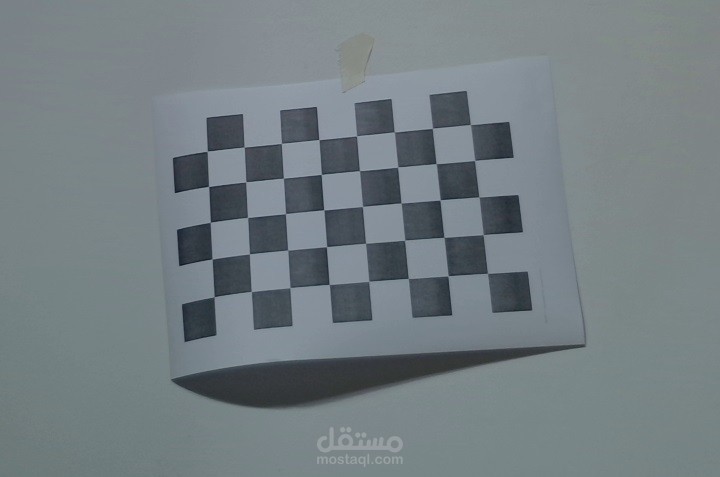

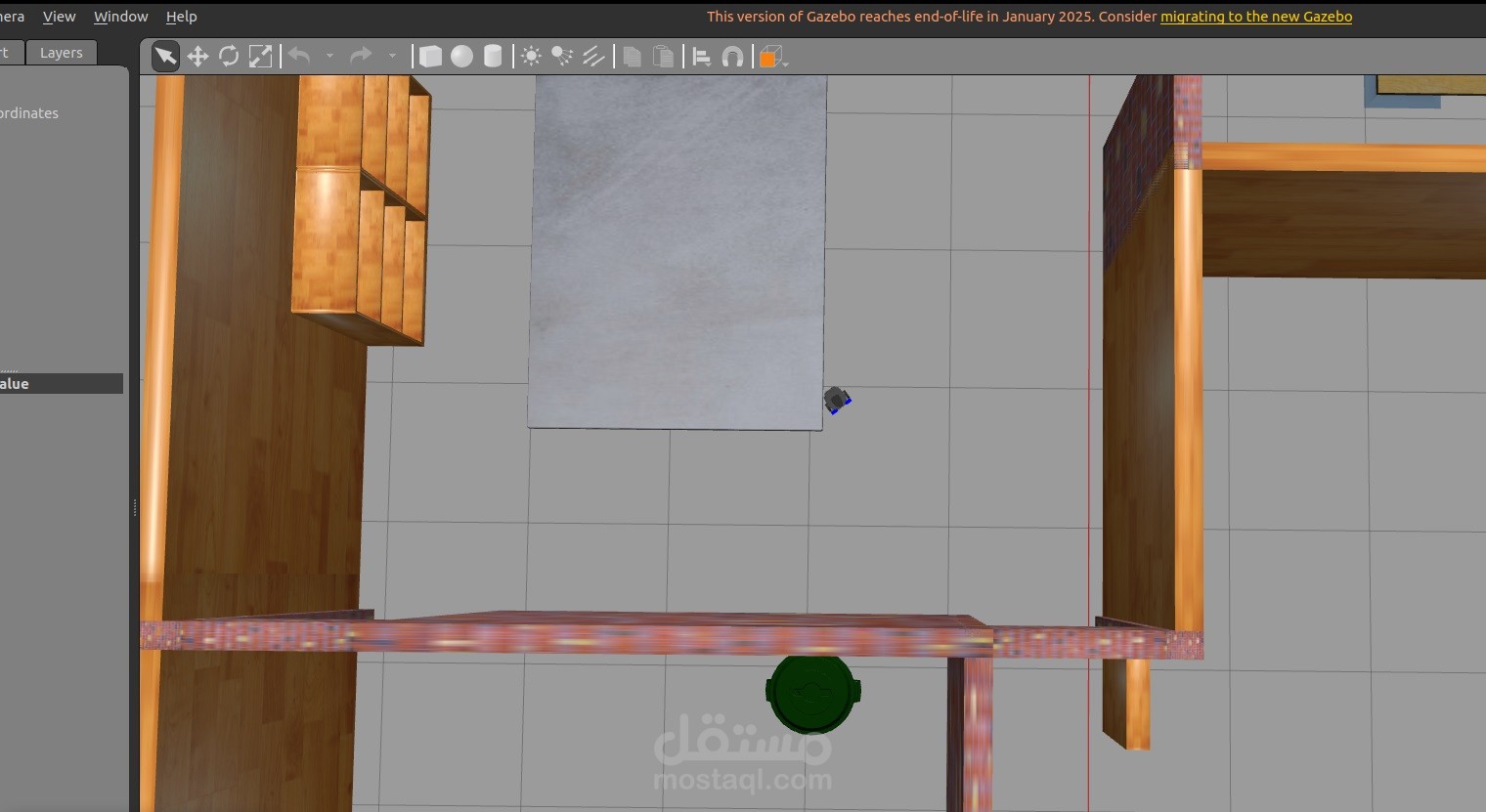
Developed a high-precision indoor SLAM system using Visual-LiDAR data fusion on ROS2. Expertise in sensor integration, Gazebo simulation, and autonomous path planning for robotics graduation projects.
تصميم نظام متكامل للروبوتات يعتمد على دمج بيانات الحساسات (Data Fusion) لرسم خرائط داخلية دقيقة. مثالي لطلاب هندسة الميكاترونكس والحاسبات المهتمين بـ Turtlebot3 و Gazebo.