Line following robot
تفاصيل العمل
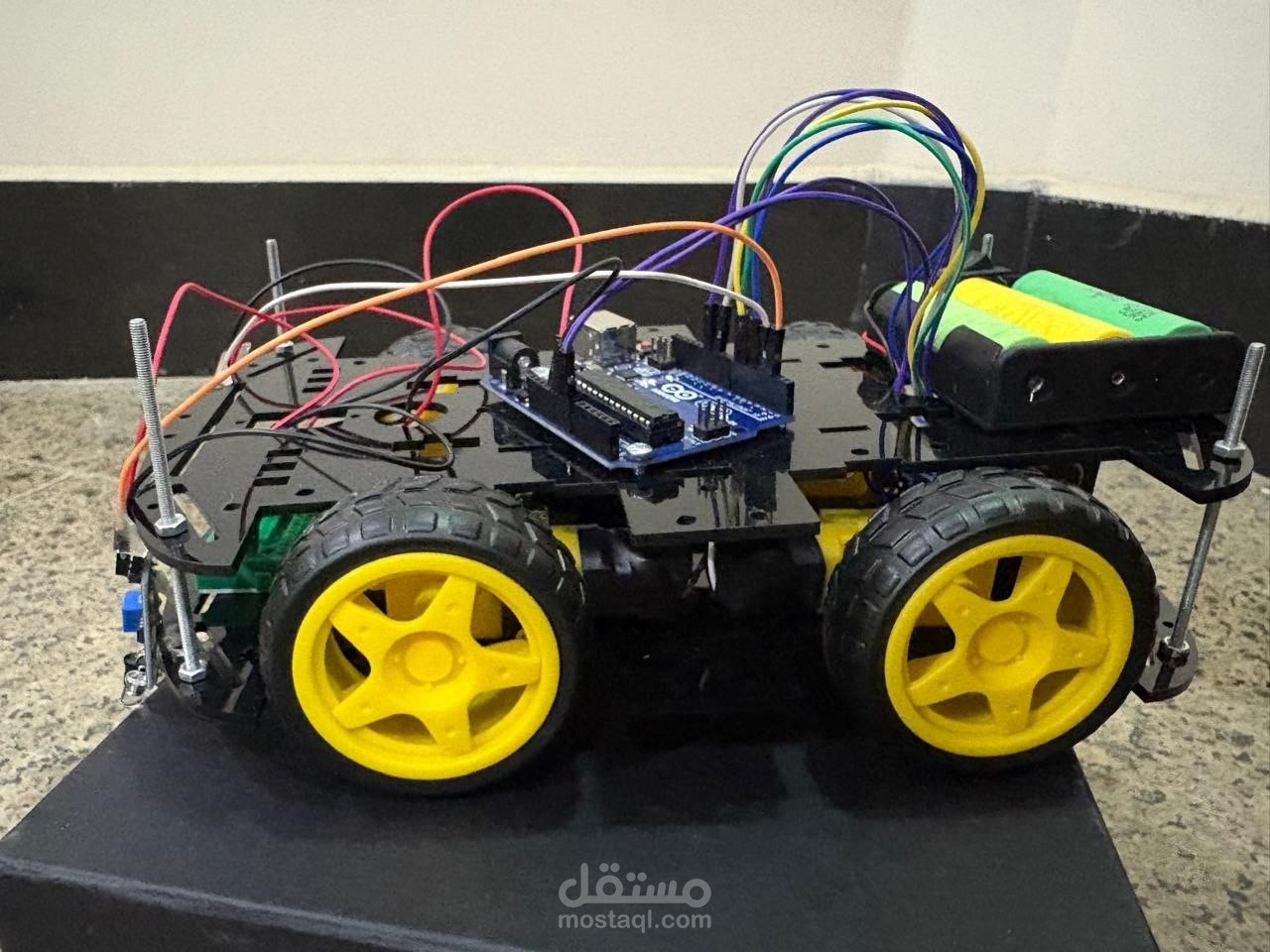
Designed and built a Line Following Robot using sensors and microcontroller programming. Implemented algorithms to detect and follow a path accurately, optimizing speed and stability. Gained hands-on experience in robotics, electronics, and problem-solving.
صممت وركبت روبوت يتبع الخط باستخدام حساسات وبرمجة المتحكم الدقيق. طبقت خوارزميات للكشف عن المسار ومتابعته بدقة، مع تحسين السرعة والثبات. اكتسبت خبرة عملية في الروبوتات والإلكترونيات وحل المشكلات.