spider robot
تفاصيل العمل
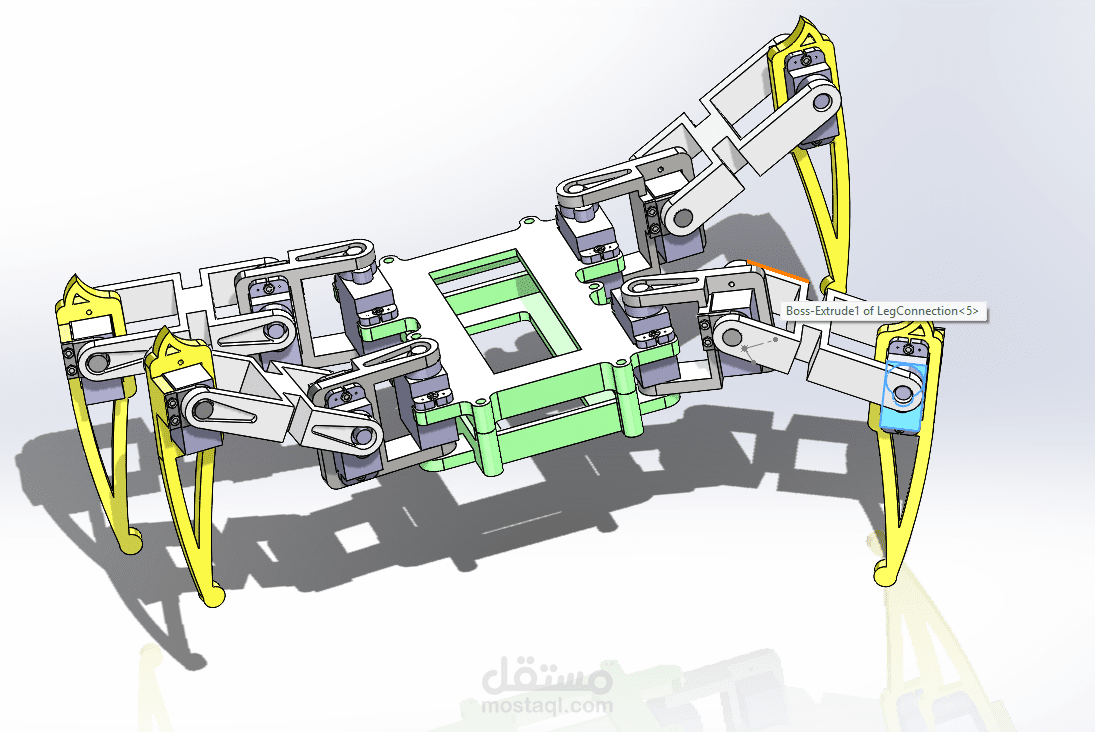
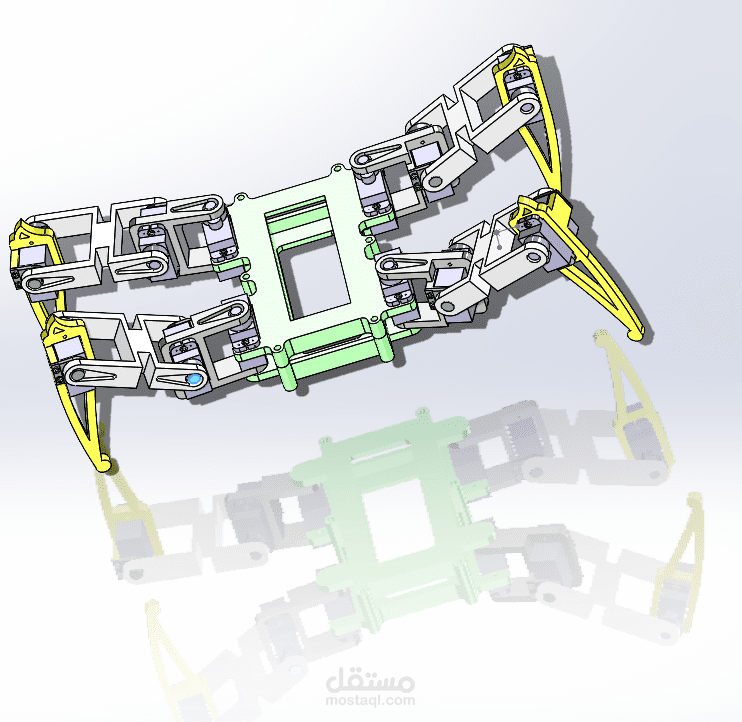
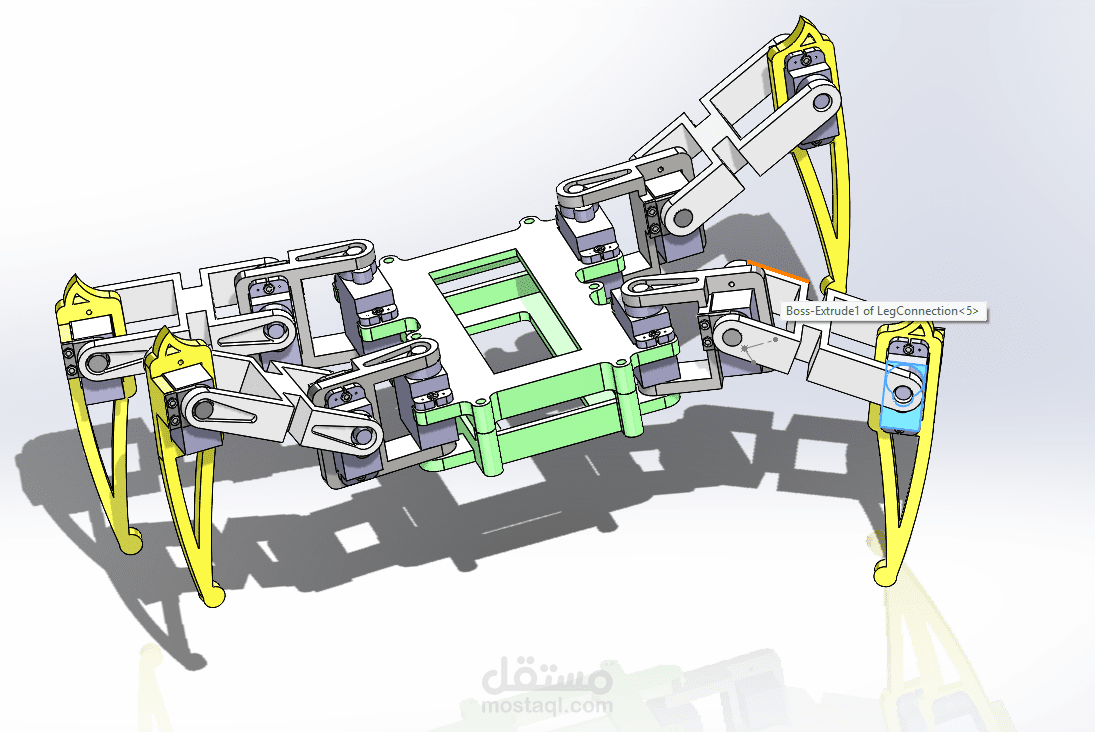
مشروع Spider Robot: تصميم وتطوير روبوت سداسي الأرجل (Hexapod) أو ثماني الأرجل يعمل بتقنية الميكاترونكس المتكاملة. يتميز الروبوت بقدرته على المشي بسلاسة على مختلف التضاريس، وتجنب العوائق، والتحكم فيه عن بُعد عبر تطبيق هاتف أو جهاز تحكم لاسلكي. المشروع يغطي التصميم الميكانيكي باستخدام SolidWorks، تصميم PCB مخصص للتحكم، وبرمجة متقدمة لحركة الأرجل وتوازن الروبوت.