Smart-Obstacle-Avoiding-Robot (2)
تفاصيل العمل
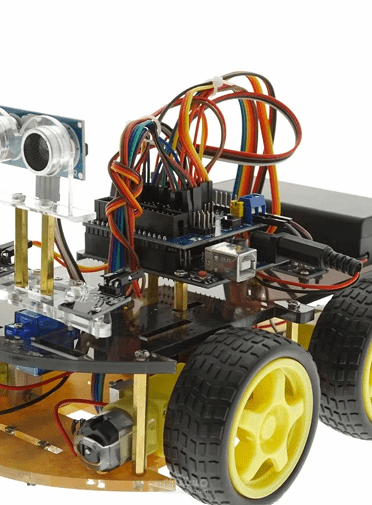
This project is an Obstacle Avoiding Robot built باستخدام Arduino.
The robot is designed to move autonomously and detect obstacles using an ultrasonic sensor. When an obstacle is detected, the robot stops, moves backward, and intelligently chooses the best direction (left or right) to avoid the obstacle and continue moving.
Additionally, an LCD screen is used to display the robot’s current status and distance readings.
Tools & Technologies
Arduino Uno
Ultrasonic Sensor (HC-SR04)
Servo Motor
Motor Driver (L298N)
DC Motors
LCD Display (16x2 I2C)
Jumper Wires
Arduino IDE
Libraries Used
Servo.h
NewPing.h
Wire.h
LiquidCrystal_I2C.h
How It Works
The robot moves forward automatically.
The ultrasonic sensor continuously measures the distance ahead.
If the distance is greater than 10 cm → the robot keeps moving.
If an obstacle is detected:
The robot stops
Moves backward
The servo scans left and right
Compares distances
Chooses the clearer path
Continues moving
Usage
Connect all components correctly to the Arduino board.
Upload the code using Arduino IDE.
Power on the robot.
The robot will start moving automatically without user control.
The LCD displays:
“Clear” → path is free
“STOP + distance” → obstacle detected
Features
Fully autonomous movement
Smart obstacle detection and avoidance
Direction decision based on distance comparison
Real-time display using LCD
Simple and efficient design
Use Cases
Graduation projects
Learning Arduino and robotics
Beginner autonomous navigation systems
Base model for advanced robotics projects