ذراع روبوتية 3 درجات حرية (3-DOF) – محاكاة وتحكم عملي
تفاصيل العمل


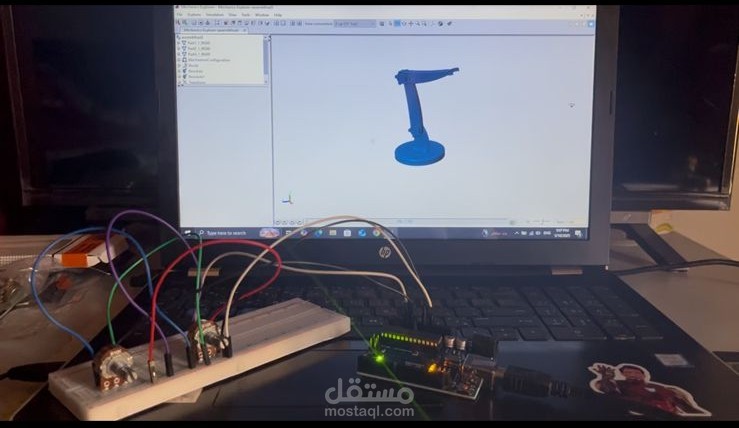
قمت بمحاكاة ذراع روبوتية 3-DOF على MATLAB، مع التحكم في حركة المفاصل باستخدام Potentiometers وBreadboard.
تمكنت من تحريك الذراع بشكل دقيق في البيئة المحاكاة، مما جمع بين المحاكاة البرمجية والتحكم اليدوي الفعلي.
المهارات المستخدمة:
محاكاة الحركة في MATLAB / Simulink
التحكم في المفاصل باستخدام Potentiometers وBreadboard
فهم عملي لربط المحاكاة بالتحكم اليدوي
أساسيات الإلكترونيات والميكاترونكس
النتيجة:
ذراع روبوتية 3-DOF يمكن التحكم بها في بيئة المحاكاة بشكل مباشر، مما يعكس قدرة على التحكم الهجين بين المحاكاة والواقع.