ذراع روبوتية 6 درجات حرية (6-DOF) – من التصميم حتى التنفيذ
تفاصيل العمل
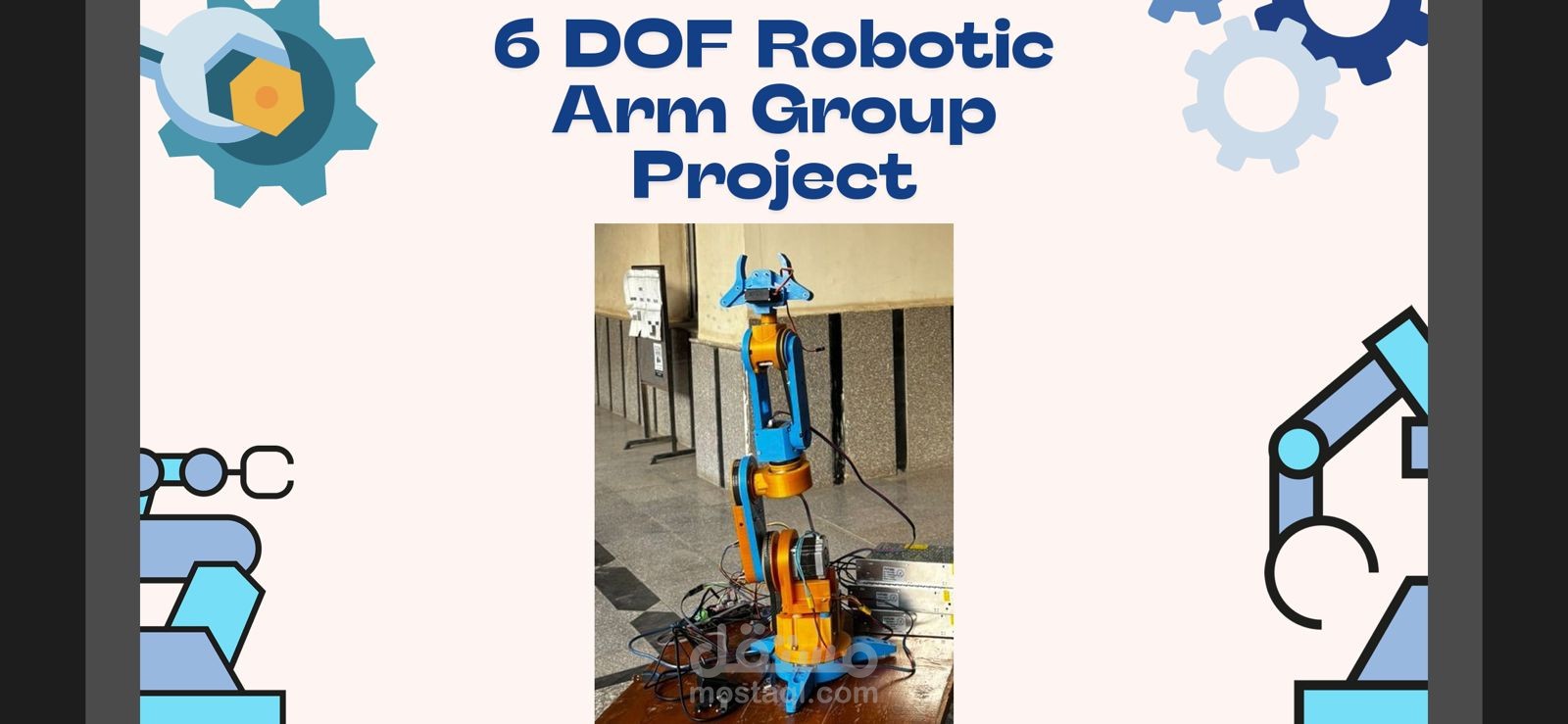
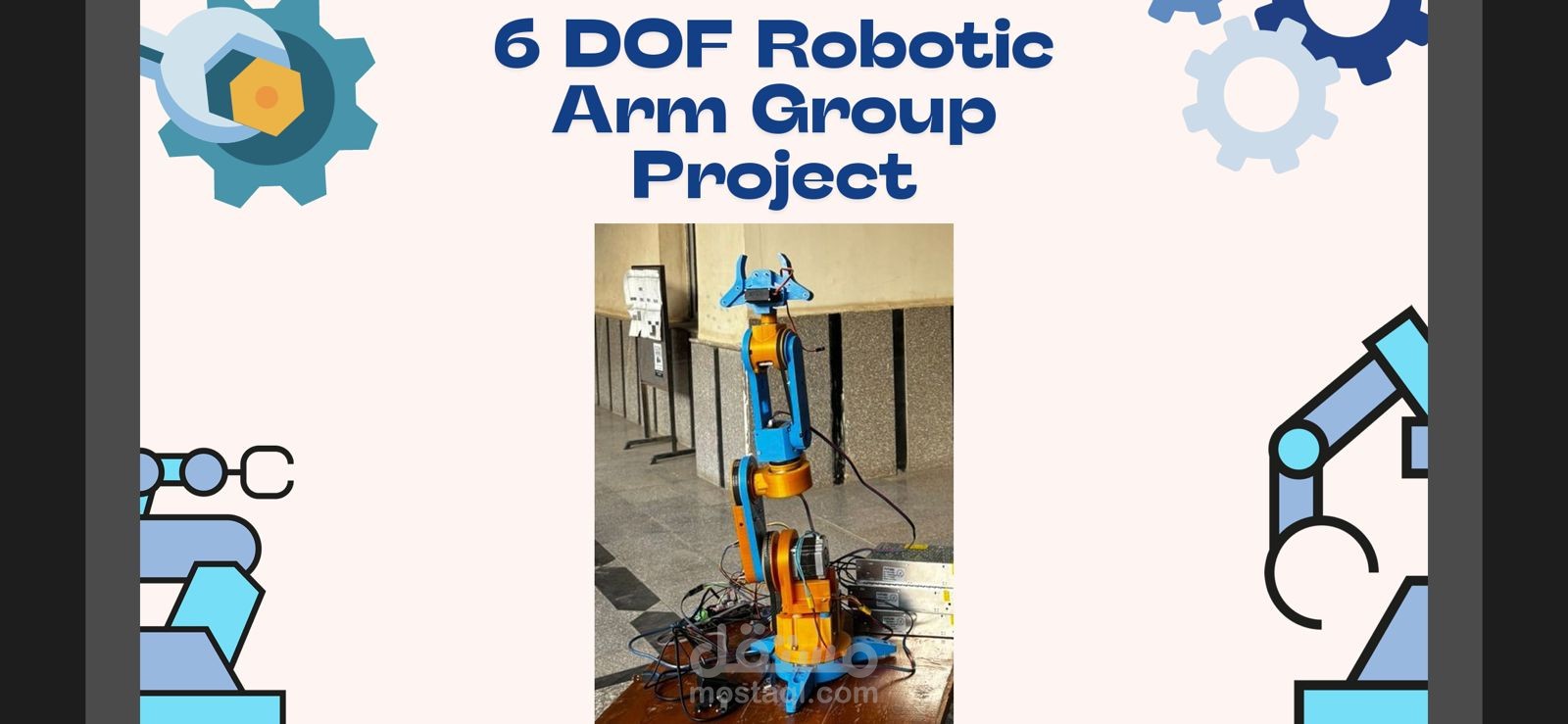

صممت نظام ميكانيكي كامل باستخدام SOLIDWORKS، وقمت بتصنيعه عبر الطباعة ثلاثية الأبعاد، ثم تم تجميع الذراع الروبوتية بالكامل من الصفر.
قمت بمحاكاة الحركية (Kinematics) في MATLAB، وتنفيذ التحكم في المفاصل، بالإضافة إلى تخطيط المسارات والتحكم في الحركة لضمان دقة الأداء وسلاسة الحركة.
المهارات المستخدمة:
التصميم الميكانيكي في SOLIDWORKS
الطباعة ثلاثية الأبعاد والتجميع
محاكاة الحركية والتحكم في MATLAB
تخطيط المسار والتحكم في الحركة
مهارات هندسية متكاملة بين الميكانيكا والكهرباء والبرمجة
النتيجة:
تم تطوير ذراع روبوتية عملية تعمل بكفاءة، مع إمكانية التحكم الكامل في الحركة والدقة العالية في تنفيذ المسارات المحددة.