تطوير روبوت ذاتي القيادة لتجنب العوائق (Autonomous Obstacle Avoidance Robot)
تفاصيل العمل
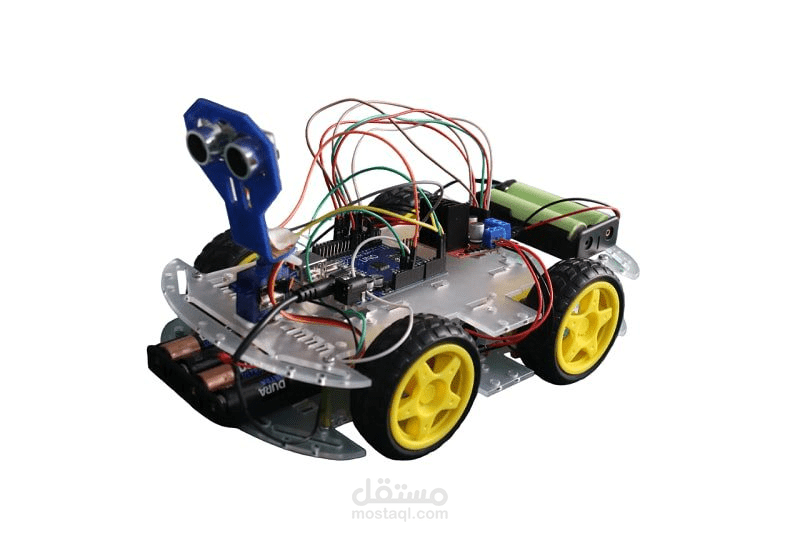
قمت بتصميم وبناء روبوت متحرك يعمل بنظام الملاحة الذاتي، حيث يمتلك القدرة على استكشاف البيئة المحيطة واتخاذ قرارات فورية لتجنب الاصطدام بالعوائق.
المواصفات التقنية للمشروع:
نظام الاستشعار (Sensing): دمج مصفوفة من الحساسات (Ultrasonic/IR Sensors) لمسح المحيط بدقة وتحديد المسافات في الوقت الحقيقي.
خوارزميات التحكم (Control Algorithms): برمجة منطق التحكم باستخدام C++/Arduino لمعالجة البيانات الواردة من الحساسات وتحويلها إلى أوامر حركة للمحركات (Object Detection & Path Planning).
إدارة الطاقة والحركة: تصميم نظام دفع رباعي وتوصيلات كهربائية مستقرة لضمان استجابة سريعة للمناورات في البيئات المزدحمة.
Embedded Logic: تطوير كود برمجي فعّال يعتمد على "تجنب العقبات" (Obstacle Avoidance Logic) لضمان استمرارية حركة الروبوت دون تدخل بشري.