تصميم وتطوير ذراع روبوتية (6-DOF) بنظام تحكم ذكي يعتمد على الشبكات العصبية (ANN)
تفاصيل العمل
قمت بتطوير مشروع متكامل لذراع روبوتية سداسية المحاور (6-DOF)، يجمع بين دقة التصميم الميكانيكي وكفاءة الذكاء الاصطناعي في حل معضلات التحكم المعقدة.
أبرز نقاط القوة في المشروع:
التصميم الميكانيكي (SolidWorks): بناء نموذج 3D من الصفر مع التركيز على الحركة الفعّالة وقوة القبضة (Gripper).
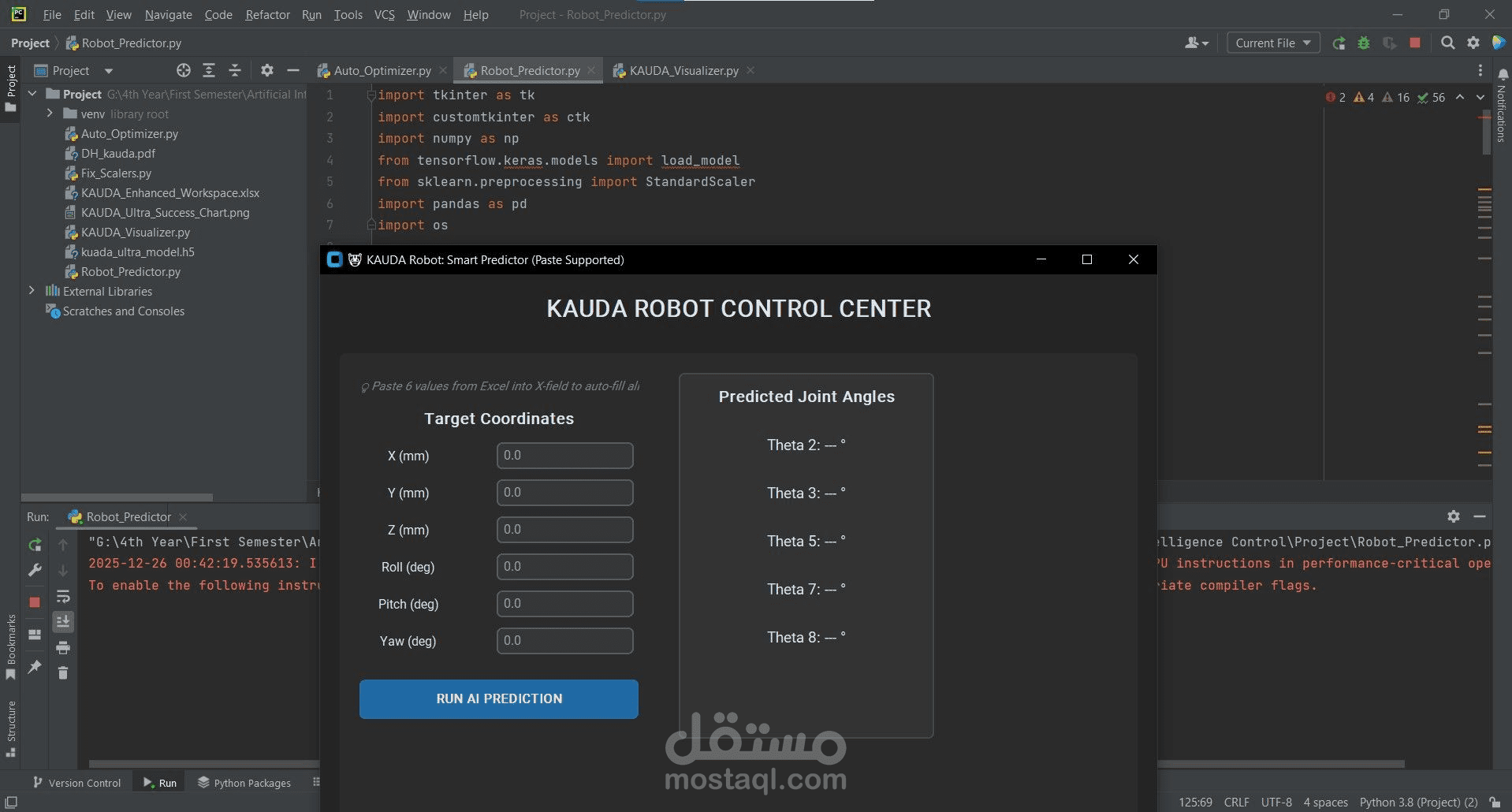
التحكم القائم على الذكاء الاصطناعي (AI-Driven Control):
ابتكار حل بديل للمعادلات الرياضية التحليلية المعقدة (Inverse Kinematics) باستخدام نموذج ANN سريع وعالي الكفاءة.
تدريب شبكة عصبية متعددة الطبقات (Multi-layer Neural Network) على مجموعة بيانات ضخمة (Big Data) تحتوي على مليون سجل من بيانات الحساسات.
تحقيق دقة تنبؤية تصل إلى 94.88% في التحكم في مفاصل الروبوت، مما يضمن حركة انسيابية وسريعة.
التكامل التقني (Simulink & Arduino): تصدير التصميم لبيئة MATLAB/Simulink لربط خوارزميات الذكاء الاصطناعي بالتحكم المباشر عبر Arduino في الوقت الحقيقي (Real-time).
لماذا هذا المشروع؟
يعكس هذا العمل قدرتي على التعامل مع البيانات الضخمة، وتطوير نماذج تعلم آلي (Machine Learning) وتطبيقها عملياً في الأنظمة الروبوتية لتقليل زمن المعالجة وتحسين الأداء.