multi-tasking robots
تفاصيل العمل
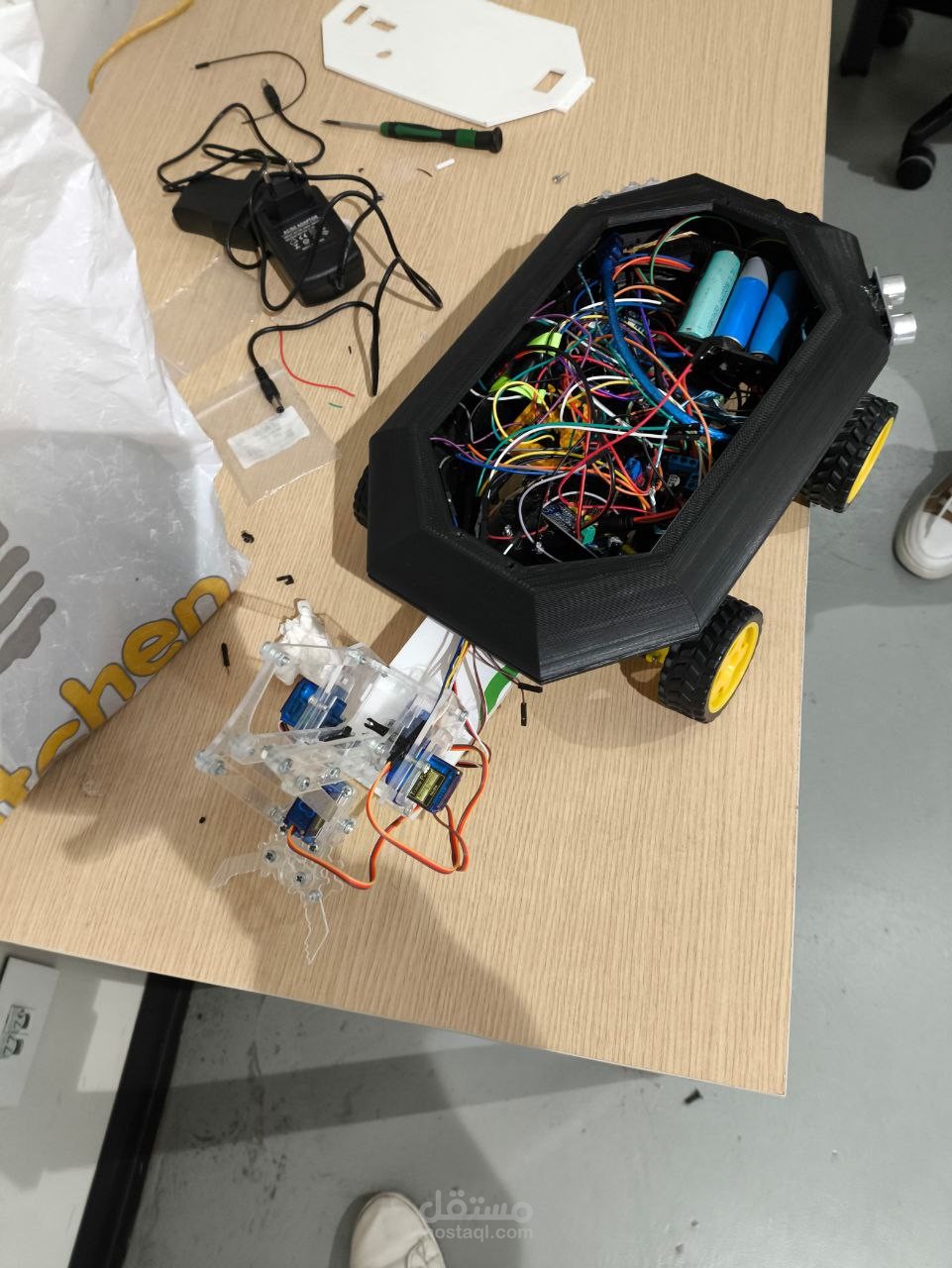
مشروعي في روبوت ذكي متعدد المهام، قادر على متابعة الخطوط وتجنب العقبات، ويحتوي على ذراع آلية للقبض والنقل (Pick & Place).
قدرات الروبوت:
1️⃣ يتبع الخطوط على الأرض بدقة باستخدام حساسات خط.
2️⃣ يتجنب العقبات تلقائيًا أثناء الحركة.
3️⃣ الذراع الآلية تمكنه من التقاط ونقل الأشياء الصغيرة بسهولة.
4️⃣ مناسب للتطبيقات التعليمية والتجريبية في مجال الروبوتات والذكاء الاصطناعي.
التقنيات المستخدمة:
حساسات خط | حساسات مسافة (Ultrasonic) | ذراع آلية | برمجة الحركة والتفاعل | منطق التحكم الذكي