Mobile car (arm robot +car)
تفاصيل العمل
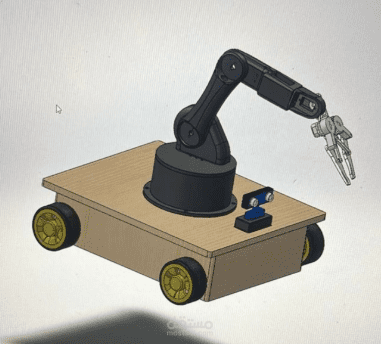
A mobile robot designed to move and perform object manipulation tasks using a robotic arm mounted on a car chassis. The system combines mechanical design, control, and embedded systems to enable movement and object handling.
At this project I design at all at solid works with his simulation and stress