نظام سلة المهملات الذكية ذاتية التشغيل باستخدام Arduino
تفاصيل العمل
1. توضيح نوع العمل:
يعد هذا المشروع تطبيقاً عملياً في مجال أتمتة المنازل (Home Automation) والأنظمة المدمجة، حيث يهدف إلى تحويل حاويات النفايات التقليدية إلى أدوات ذكية تعمل بدون تلامس بشري. يعتمد النظام على تقنيات الاستشعار عن بُعد لفتح وإغلاق الغطاء تلقائياً، مما يساهم في تعزيز معايير النظافة العامة والحد من انتشار الجراثيم في البيئات المختلفة مثل المنازل، المكاتب، والمستشفيات.
2. ميزات المشروع:
- تشغيل صحي وبدون تلامس: يتيح للمستخدم التخلص من النفايات دون الحاجة لفتح الغطاء يدوياً، مما يقلل من احتمالات نقل العدوى.
- استجابة فورية ودقيقة: يتميز النظام بسرعة استجابة عالية بفضل خوارزمية برمجية تعالج المسافة الملتقطة في أجزاء من الثانية.
- كفاءة في استهلاك الطاقة: تم تحسين الكود البرمجي لضمان استهلاك أدنى مستويات الطاقة، مما يسمح بتشغيل النظام لفترات طويلة باستخدام البطاريات.
- تصميم مرن وقابل للتطوير: يمكن تركيب هذا النظام على حاويات بأحجام مختلفة، كما يمكن تطويره مستقبلاً لإضافة مؤشرات لمستوى الامتلاء.
3. طريقة التنفيذ:
تم تنفيذ المشروع من خلال دمج المكونات الإلكترونية مع منطق برمجي متكامل كالتالي:
-- الأدوات المستخدمة:
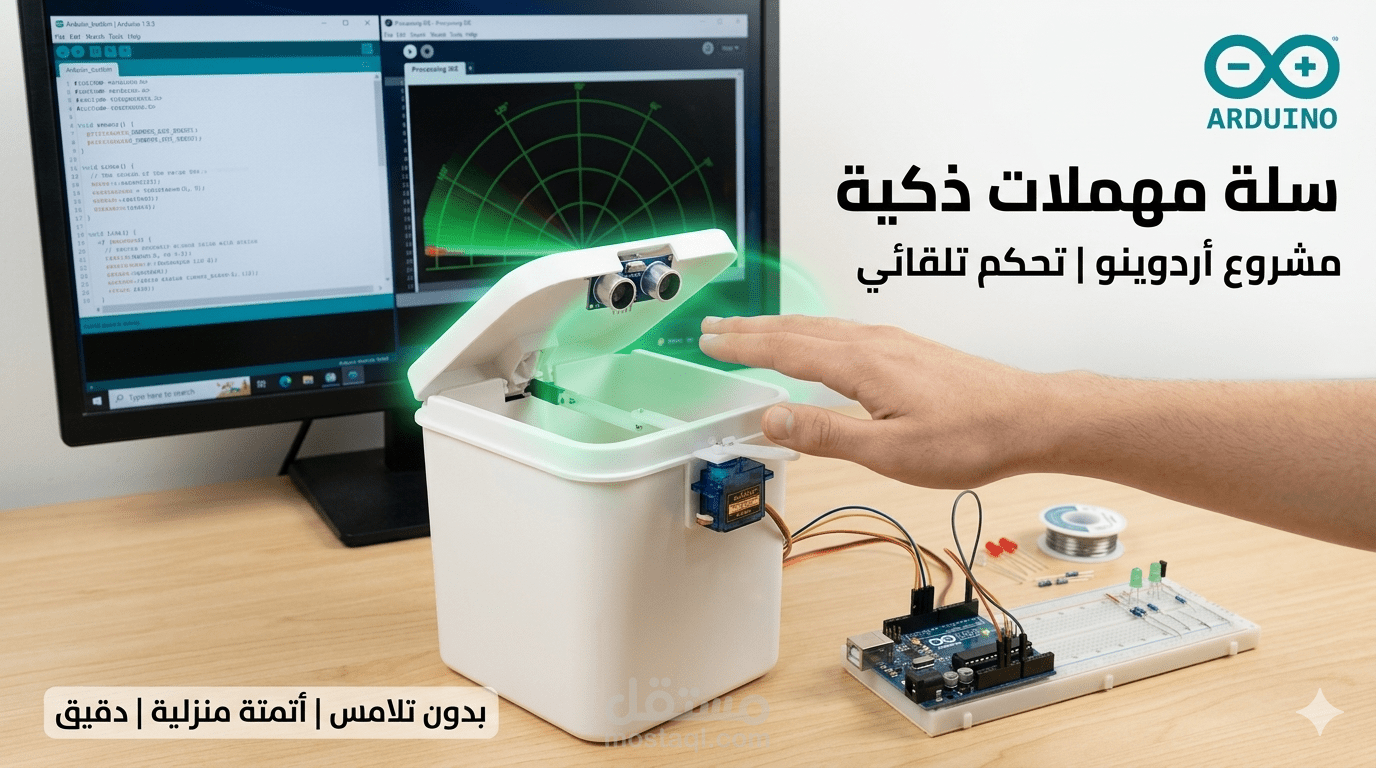
- لوحة أردوينو أونو (Arduino UNO): كعقل مدبر لمعالجة البيانات وإعطاء الأوامر.
- مستشعر فوق صوتي (Ultrasonic Sensor): لرصد اقتراب اليد أو الأجسام من مسافة محددة مسبقاً.
- - محرك سيرفو (Servo Motor): المسؤول عن الحركة الميكانيكية لفتح وإغلاق الغطاء بزاوية محددة.
- لوحة تجارب وأسلاك توصيل (Breadboard & Jumper Wires): لإنشاء الدائرة الكهربائية وضمان استقرار تدفق الإشارات.
-- آلية العمل البرمجية:
- يتم إرسال موجات فوق صوتية من المستشعر باستمرار لمراقبة المحيط.
- عند اقتراب جسم ضمن المسافة المبرمجة (مثلاً أقل من 20 سم)، يرسل الأردوينو نبضة برمجية لمحرك السيرفو.
- يتحرك المحرك لفتح الغطاء بزاوية 90 درجة، ويبقى مفتوحاً لفترة زمنية محددة.
- بمجرد ابتعاد المستخدم، يعود المحرك لوضعه الأصلي لإغلاق الغطاء بإحكام.