تصميم وبرمجة نظام رادار ذكي للرصد والتنبيه باستخدام Arduino
تفاصيل العمل
نوع العمل:
تصميم وتطوير نظام رادار مدمج (Embedded System) يعمل على مسح المحيط واكتشاف الأجسام الغريبة أو العوائق وتحديد مسافتها بدقة. يُعد هذا المشروع نموذجاً عملياً لتطبيقات الأنظمة الأمنية الذكية، أنظمة الإنذار المبكر، وتوجيه الروبوتات لتفادي الاصطدام. تم تصميم النظام ليعمل بكفاءة عالية مع عرض البيانات بشكل لحظي وتفاعلي.
ميزات وخصائص النظام:
- تغطية مكانية واسعة: مسح آلي للمنطقة المحيطة بزاوية 180 درجة بشكل مستمر.
- دقة القياس: حساب دقيق للمسافات وتحديد موقع الأجسام لحظة دخولها نطاق الرصد.
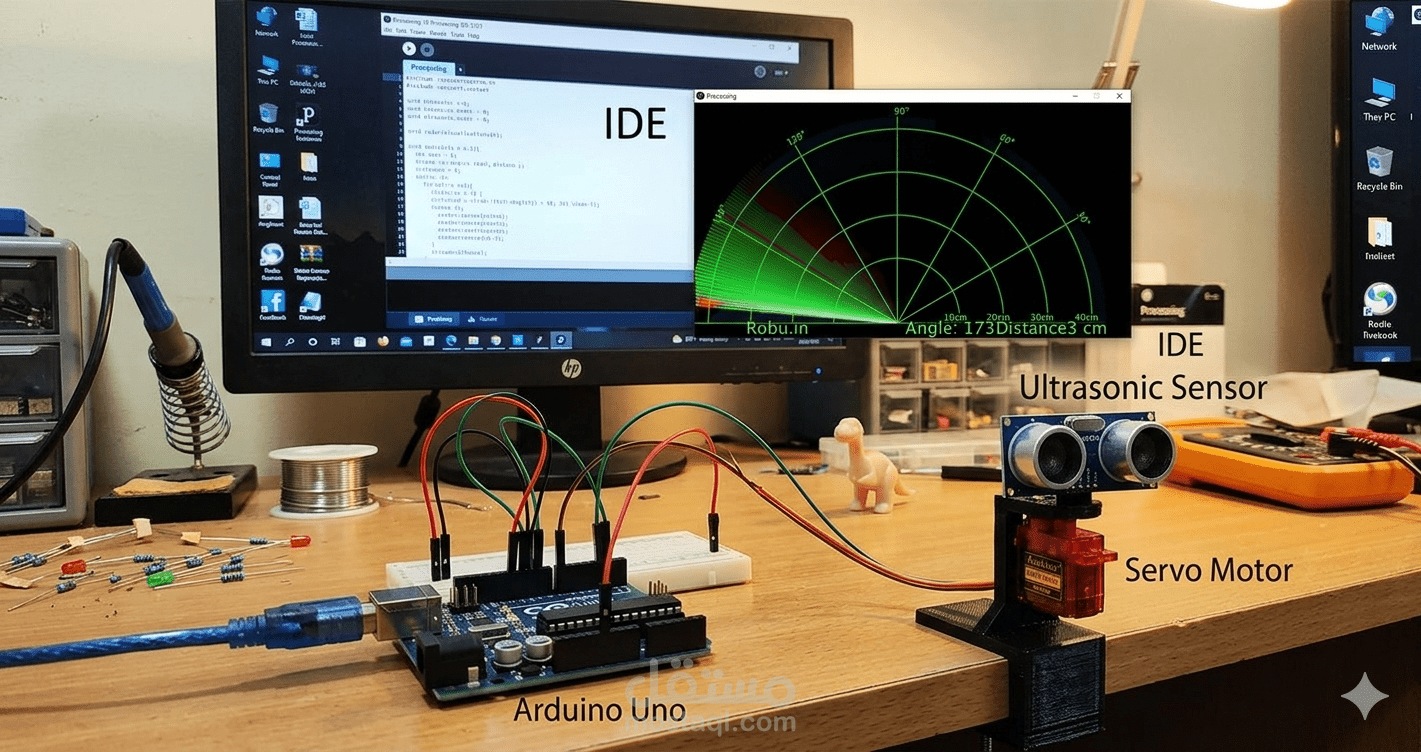
- واجهة مستخدم بصرية: ربط النظام ببيئة Processing لعرض حركة الرادار على الشاشة بشكل تفاعلي، بتصميم كلاسيكي دقيق (خلفية سوداء مع مؤشرات باللون الأخضر الفسفوري) لتوضيح الزوايا ومسافة الأجسام الملتقطة بوضوح تام.
- كفاءة برمجية: كتابة الكود البرمجي (بناءً على لغة C) بطريقة منظمة وبسيطة لضمان سرعة استجابة النظام دون أي تأخير (Lag).
الأدوات والتقنيات المستخدمة (طريقة التنفيذ):
- المتحكم الدقيق: لوحة Arduino Uno لمعالجة البيانات والتحكم في المكونات.
- المستشعرات: حساس الموجات فوق الصوتية (Ultrasonic Sensor) لقياس المسافات عبر ارتداد الموجات.
- المحركات: محرك سيرفو (Servo Motor) لتوجيه الحساس ومسح الزوايا المختلفة.
- البرمجيات: * Arduino IDE (لكتابة وبرمجة كود التحكم الأساسي باستخدام لغة C).
- Processing IDE (لبرمجة واجهة الرادار الرسومية واستقبال البيانات التسلسلية Serial Data من الأردوينو).