محاكاة حركة روبوت (ساعة) بنظام Toggle
تفاصيل العمل
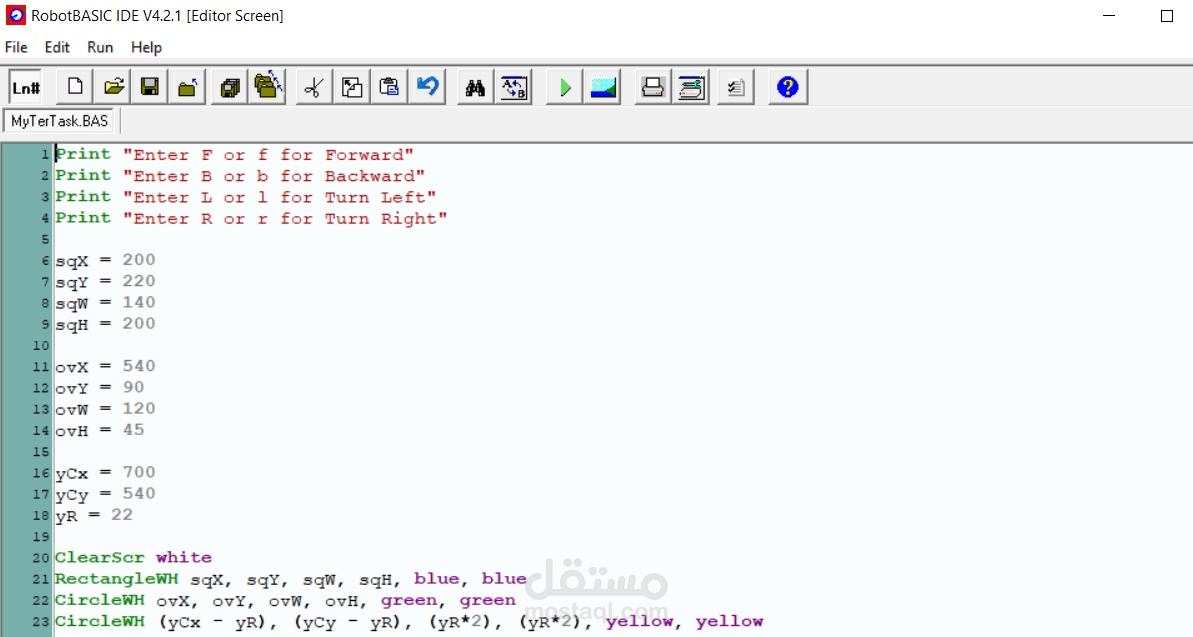
هذا المشروع عبارة عن محاكاة بسيطة لحركة روبوت باستخدام لغة RobotBASIC.
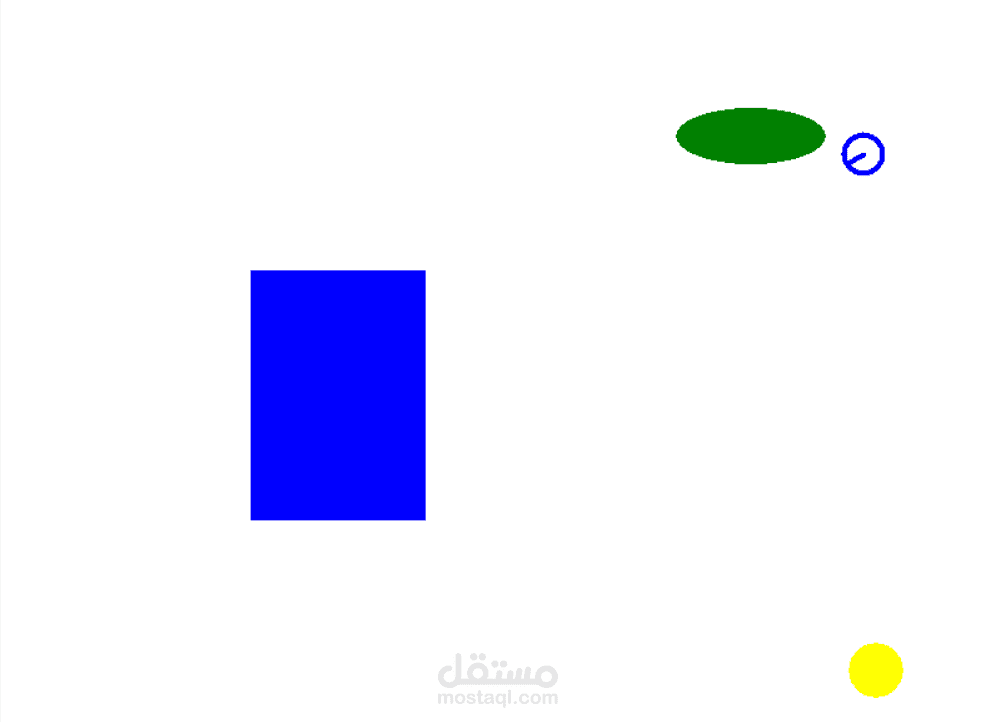
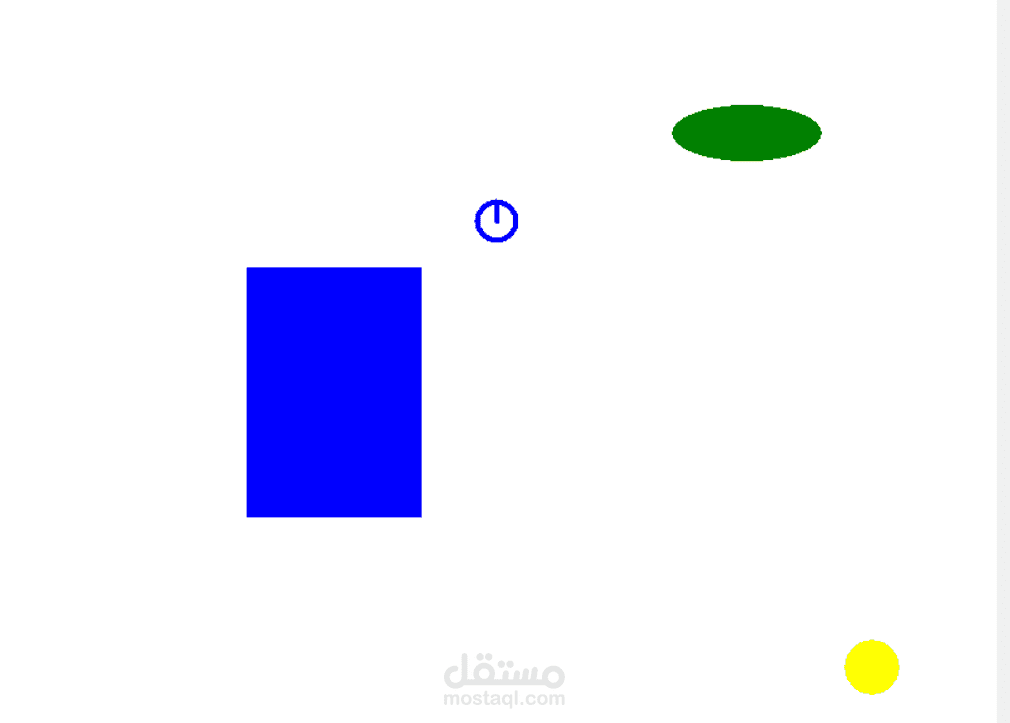
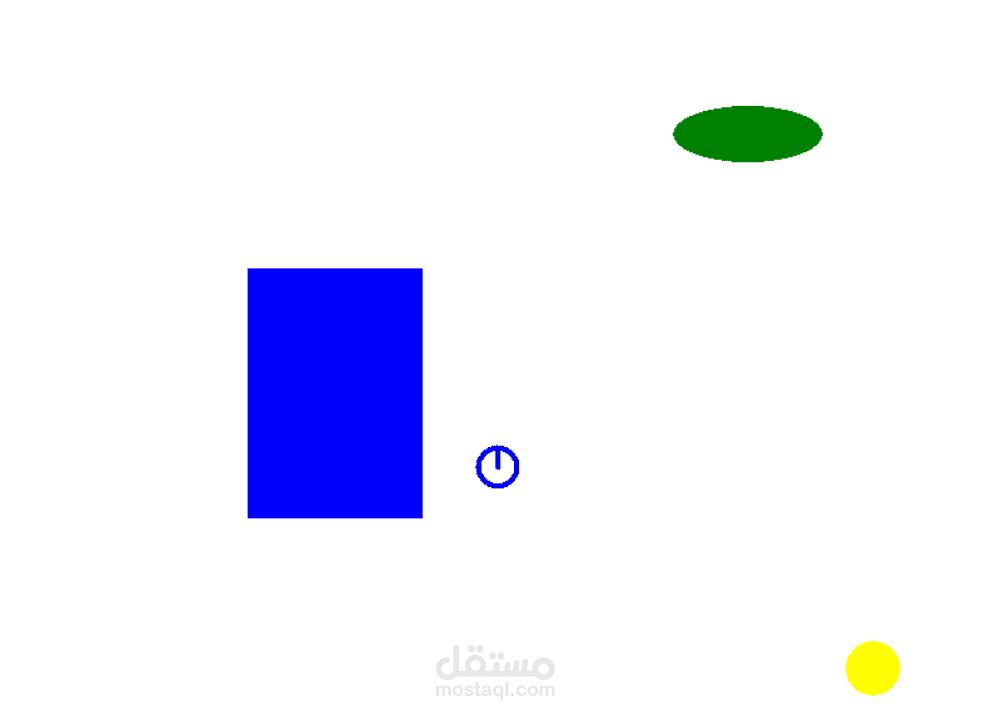
الروبوت ممثل على شكل ساعة تتحرك داخل بيئة تحتوي على أشكال هندسية.
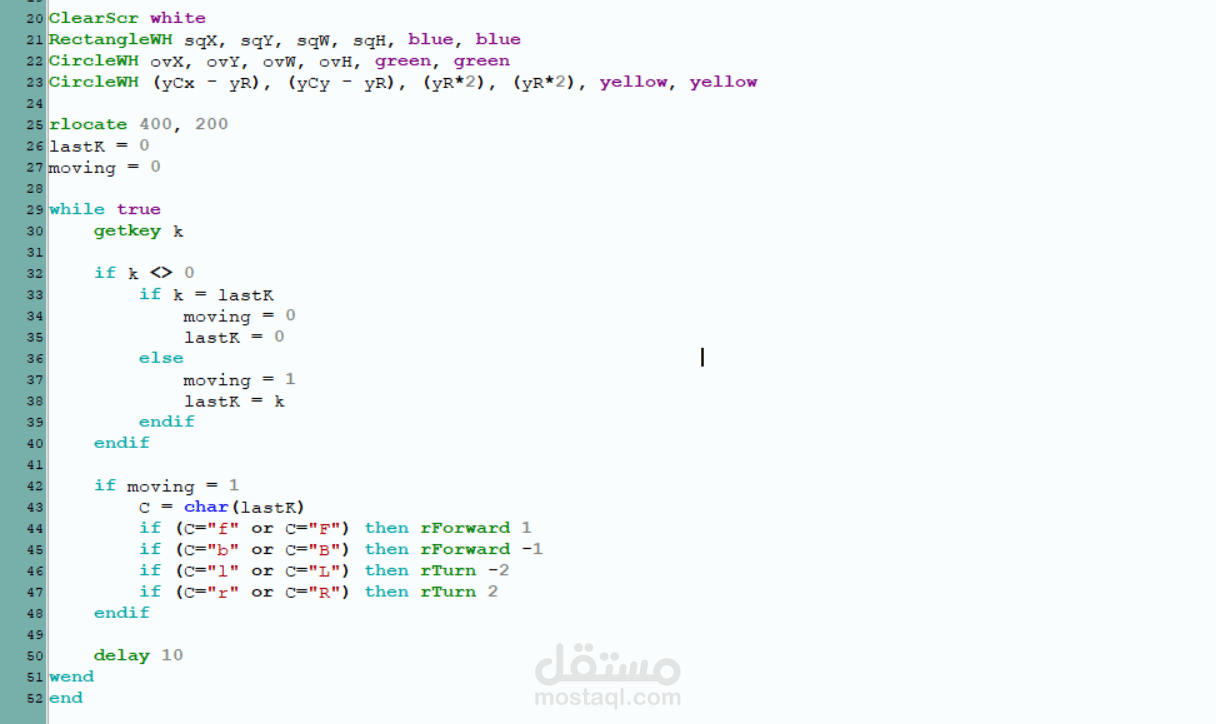
يعتمد النظام على مفهوم Toggle Control باستخدام لوحة المفاتيح:
عند ضغط المستخدم على F أو f تتحرك الساعة (الروبوت) إلى اليمين.
عند ضغط المستخدم على B أو b تتحرك الساعة إلى اليسار.
إذا ضغط المستخدم على نفس الزر السابق مرة أخرى يتوقف الروبوت عن الحركة (Waiting).
الفكرة تحاكي سلوك الأزرار في الأنظمة الروبوتية حيث يعمل الزر كـ تشغيل/إيقاف للحركة بدلاً من الحركة اللحظية.
مميزات المشروع
استخدام الرسوميات في RobotBASIC.
محاكاة حركة روبوت في بيئة ثنائية الأبعاد.
التحكم في الحركة باستخدام لوحة المفاتيح.
تطبيق مفهوم Toggle Button Contro