Chess Robot Arm – Robotic Arm Controlled Chess System
تفاصيل العمل
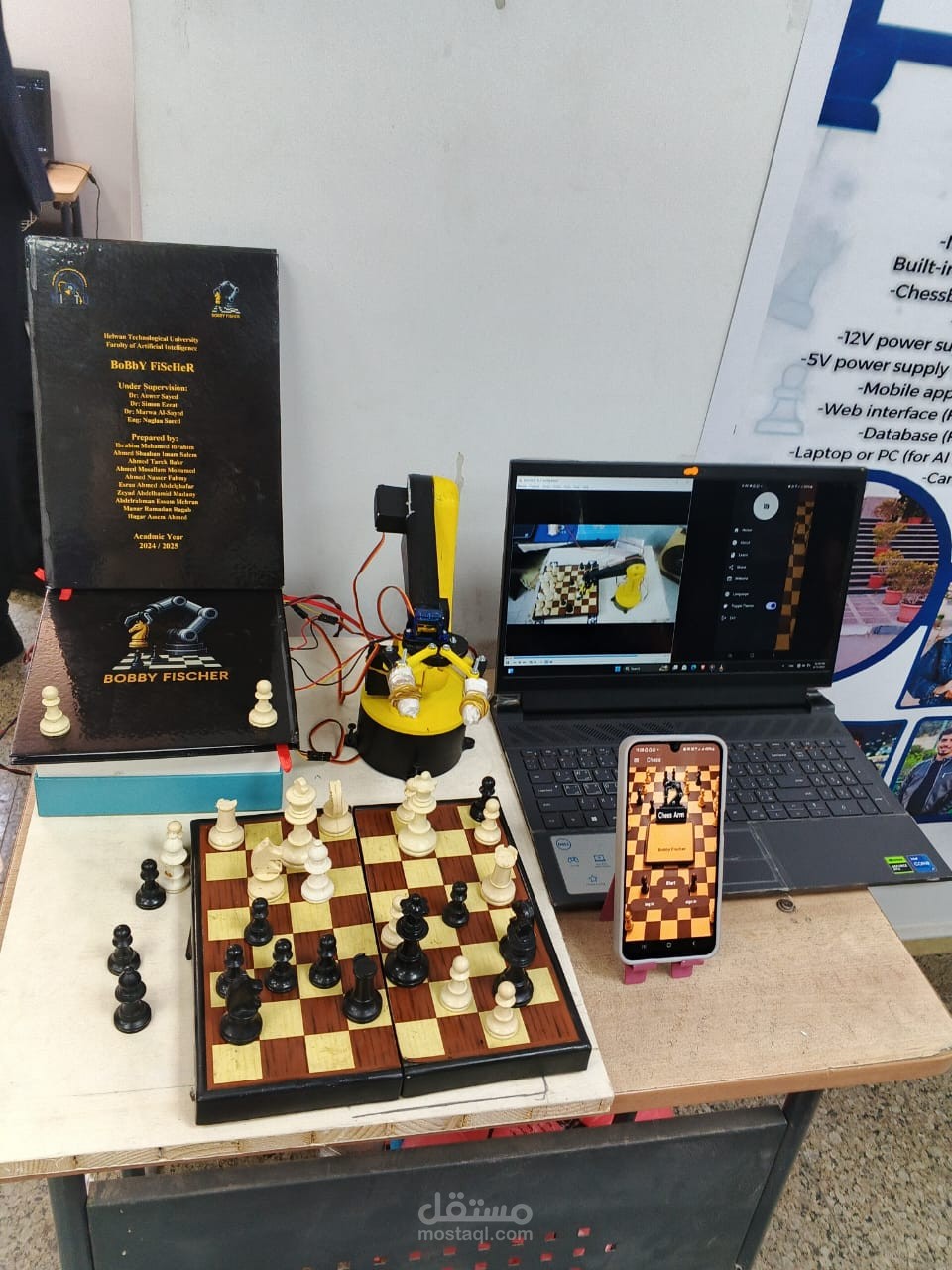



Designed and built a robotic arm capable of playing chess against a human player. The system receives the selected square from a digital chessboard interface, converts it into motor movements, and moves the piece to the target location. The project focused on precise motor control, movement smoothing, and real-time interaction between the user interface and the robotic hardware.
Technologies: Arduino, Servo Motors, Embedded C++, Robotics