تطوير نظام تحكم متكامل لسيارة روبوتية ذكية (Embedded Systems - AVR)
تفاصيل العمل
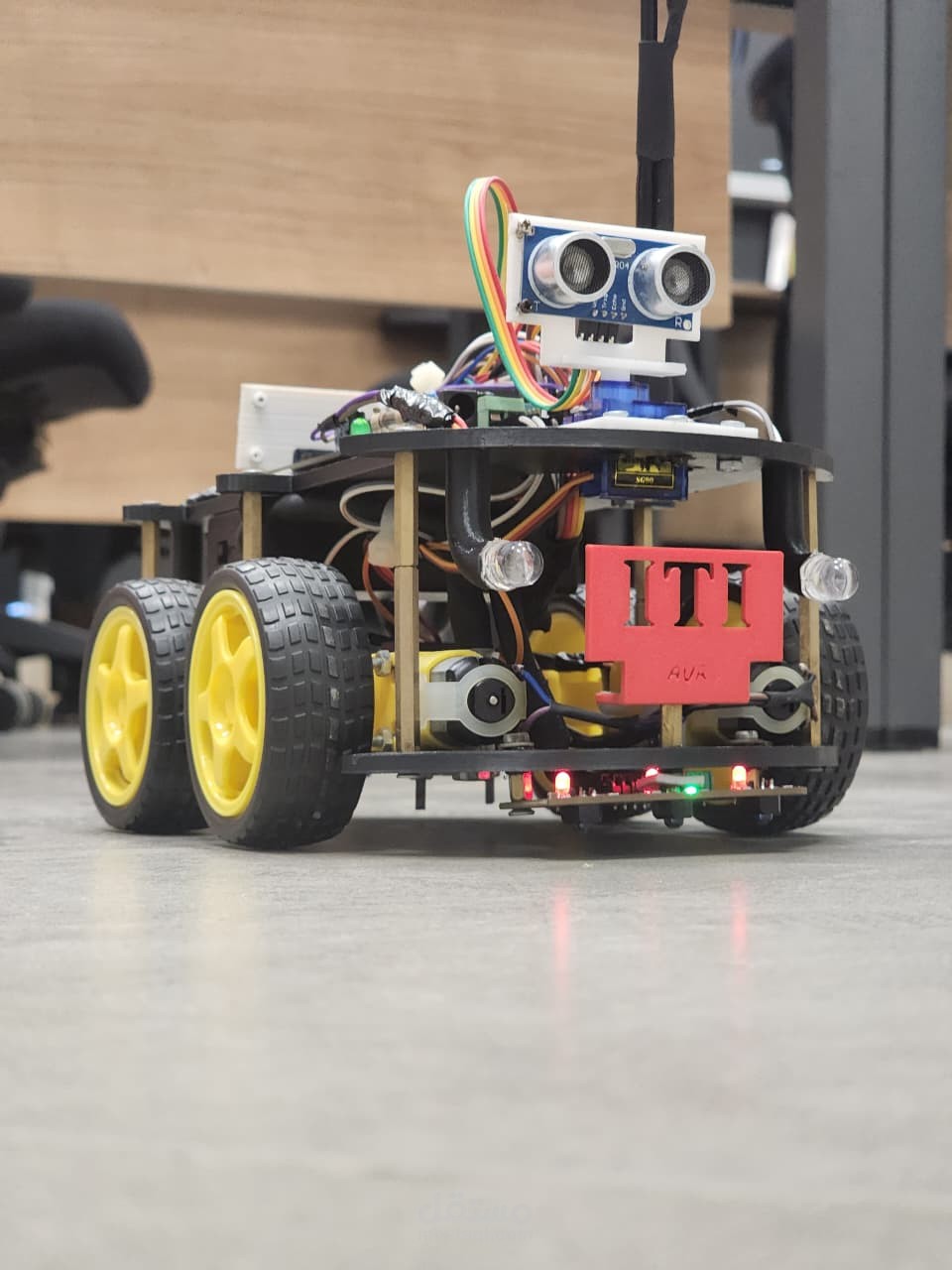
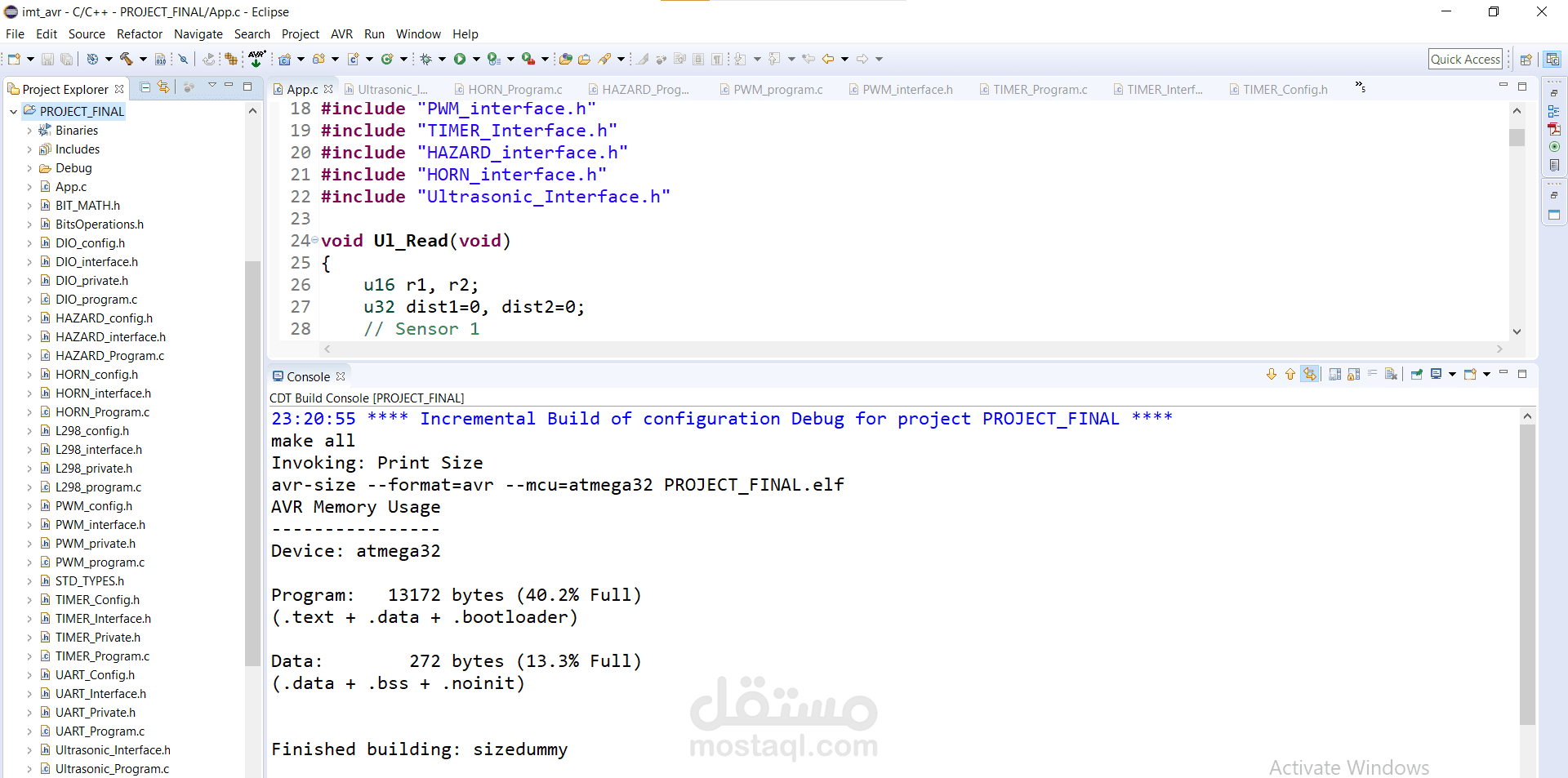
قمت بتصميم وتطوير نظام التشغيل الخاص بسيارة روبوتية ذكية تعتمد على متحكم ATMega32، حيث يدمج المشروع بين التحكم اللاسلكي والقيادة الذاتية. تم بناء النظام بالكامل بلغة C مع التركيز على كتابة تعريفات (Drivers) فعالة ومستقرة.
المميزات التقنية التي تم تنفيذها:
نظام التحكم اللاسلكي: ربط تطبيق جوال بالروبوت عبر وحدة HC-05 Bluetooth، واستخدام بروتوكول UART لتبادل البيانات والأوامر الصوتية.
القيادة الذاتية (Self-Driving): تطوير خوارزميات لتتبع الخطوط (Line Follower) وتجنب الاصطدام (Collision Avoidance) باستخدام المستشعرات المناسبة.
بناء التعريفات (Low-Level Drivers): كتابة Drivers خاصة بالتحكم في المحركات، الـ LCD، الـ Timers، الـ EEPROM، وبروتوكولات التواصل (SPI, I2C).
إدارة المهام: تطبيق مفاهيم الأنظمة المدمجة لضمان استجابة النظام في الوقت الحقيقي (Real-time response).