Autonomous Obstacle-Avoiding Robot Car using Arduino
تفاصيل العمل
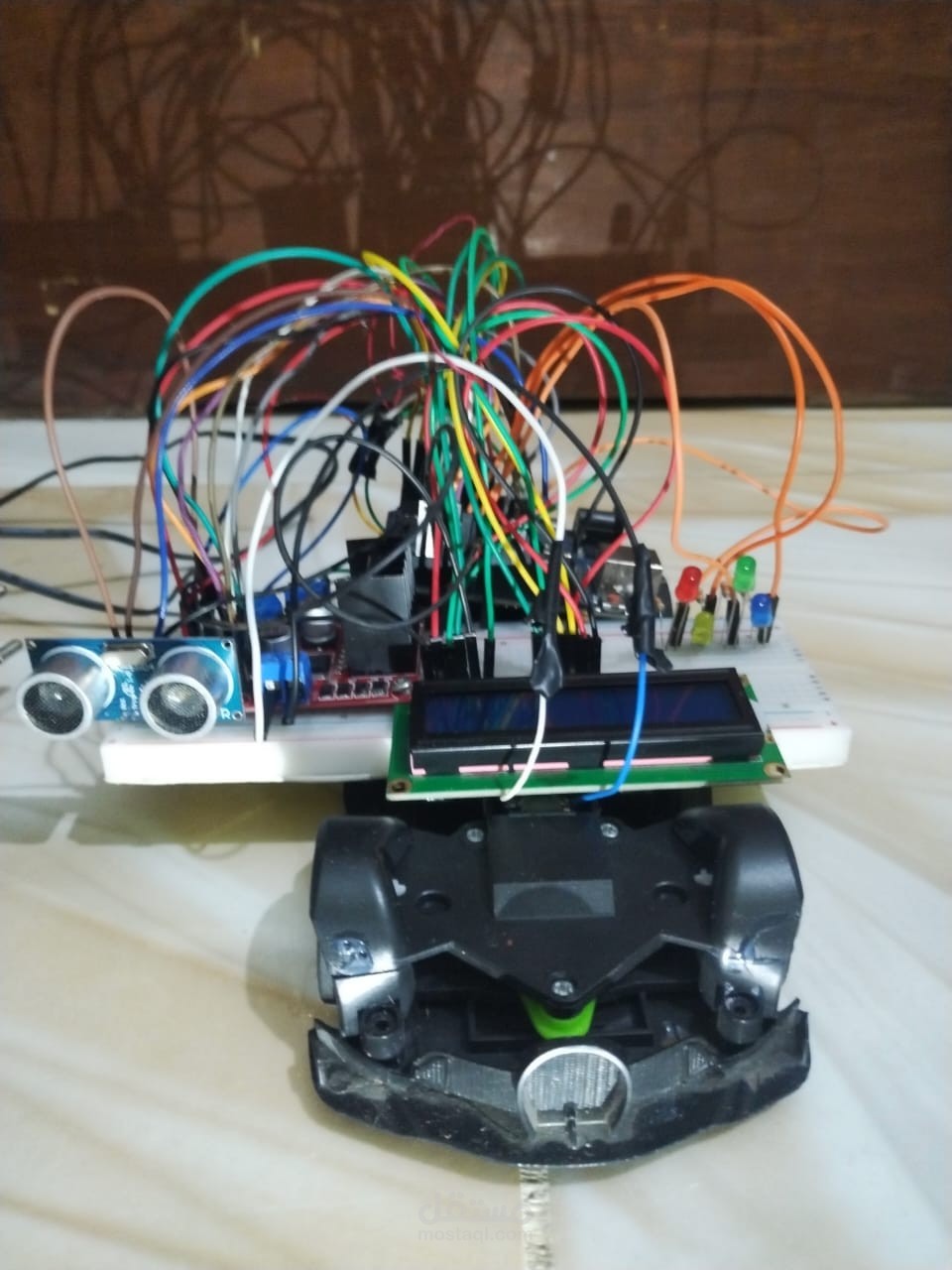
An advanced robotics project featuring a self-driving prototype capable of navigating environments autonomously while avoiding collisions.
Key Technical Achievements:
Obstacle Detection: Integrated an Ultrasonic sensor to calculate distances in real-time and detect obstacles in the car's path.
Intelligent Navigation: Developed an algorithm in C++ to process sensor data and make autonomous steering decisions (Turn Left/Right or Reverse).
Motor Control: Utilized an L298N motor driver to control the speed and direction of the DC motors based on the microcontroller's logic.
Status Feedback: Configured an LCD display and LEDs to provide real-time visual feedback on the car's current status and distance readings.
Outcome: Successfully built and programmed a functional autonomous vehicle that demonstrates core concepts of robotics, automation, and real-time embedded systems.