تصميم وتحسين ذراع روبوتية أحادية الوصلة
تفاصيل العمل
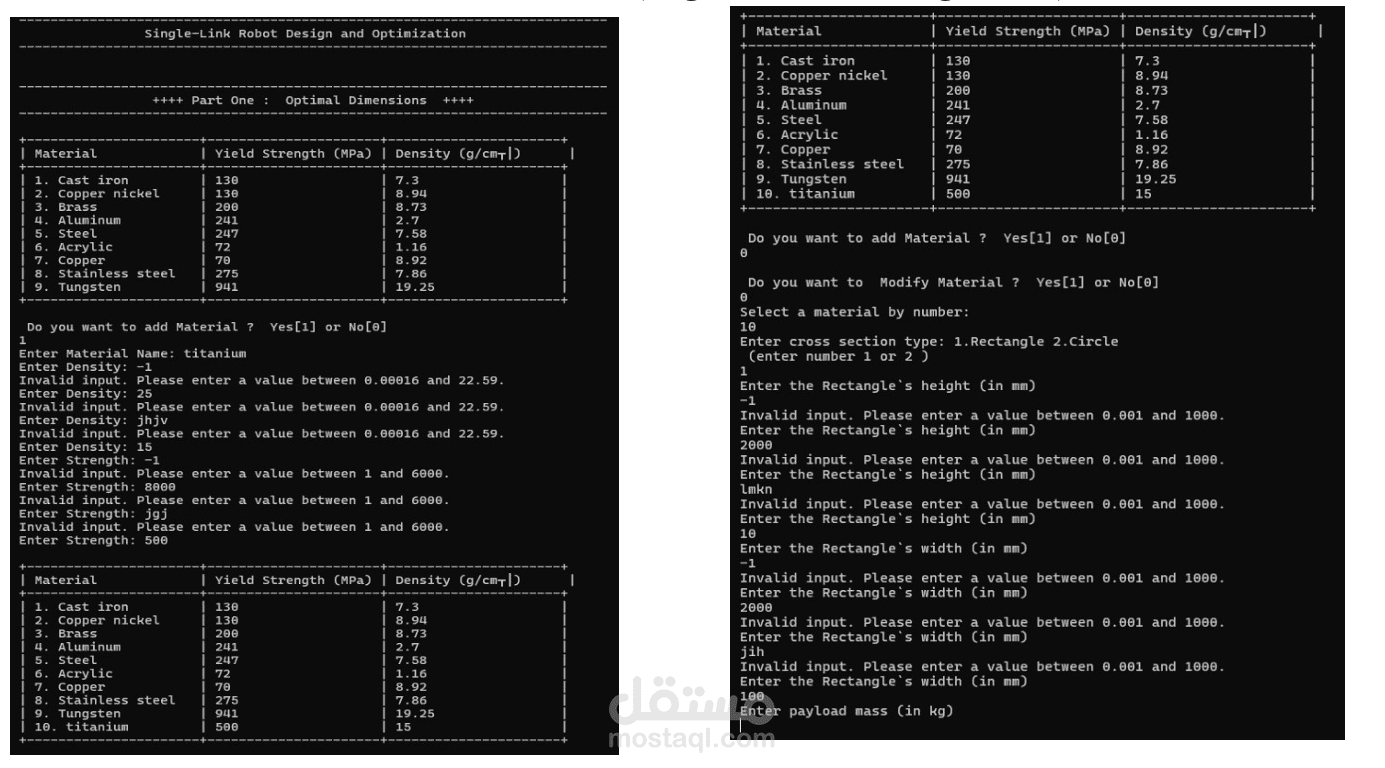
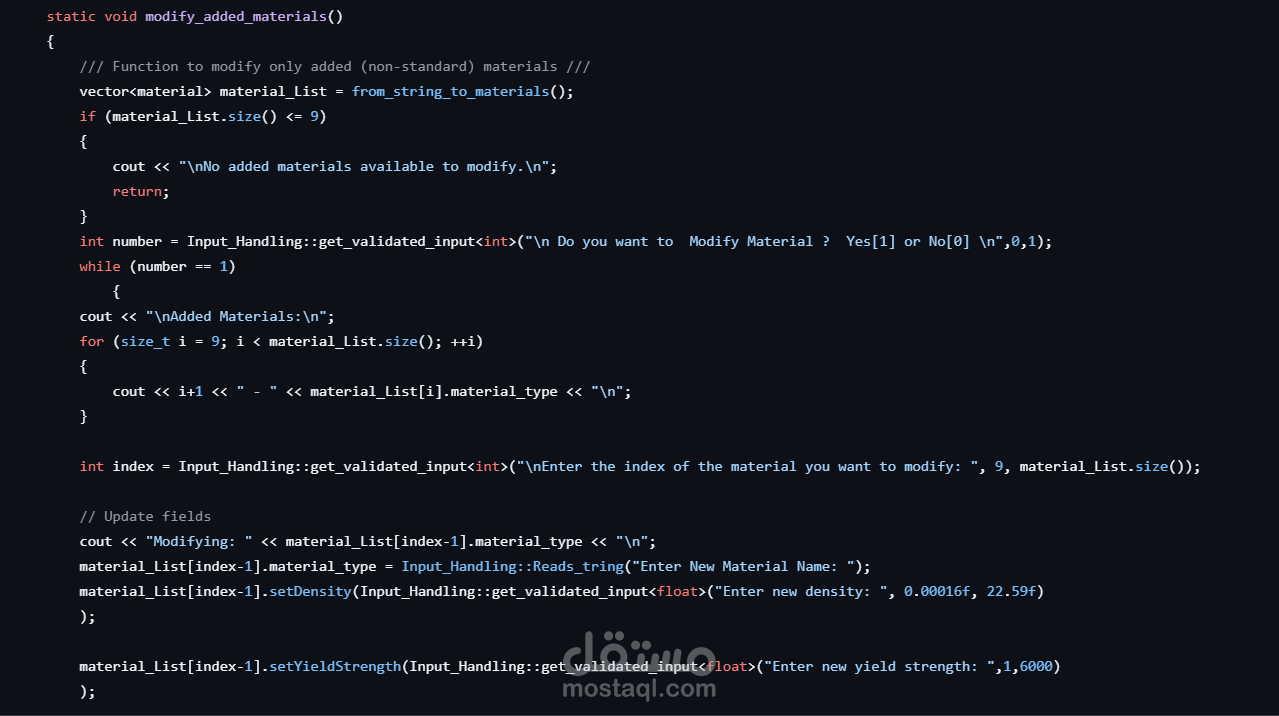
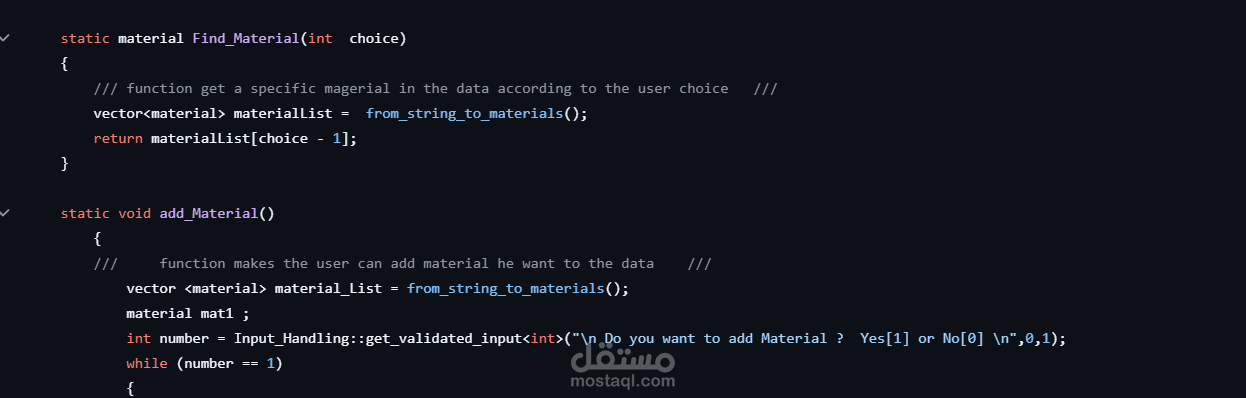
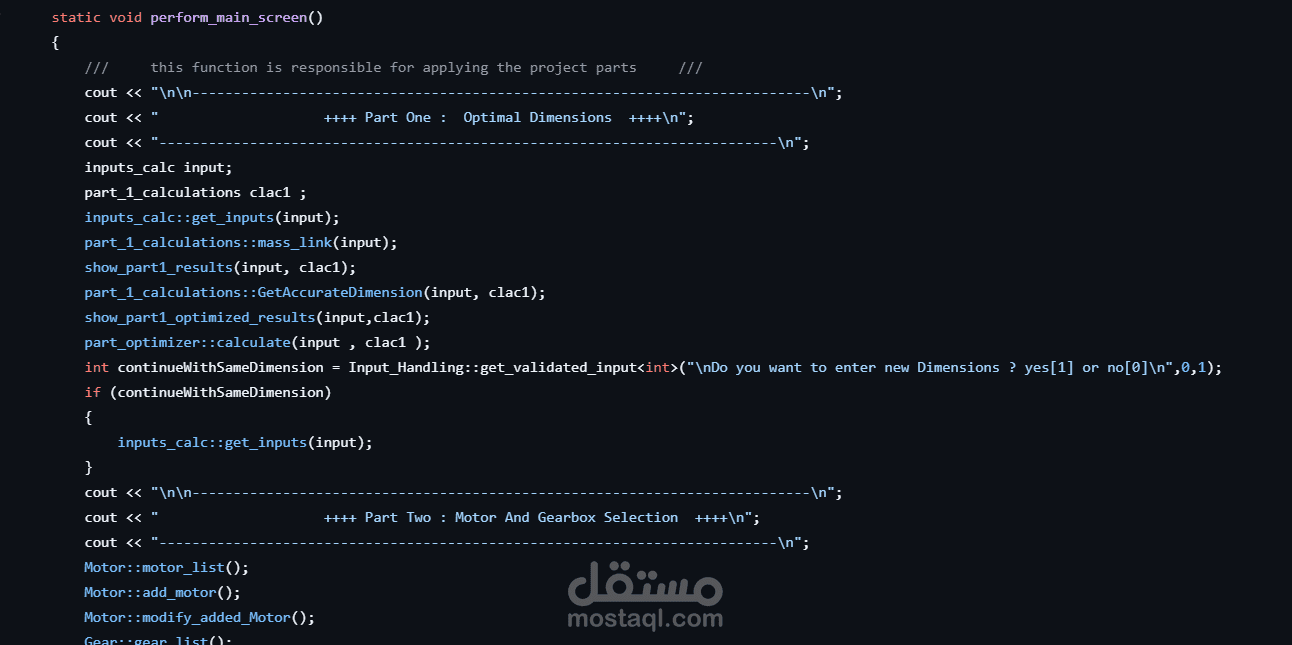
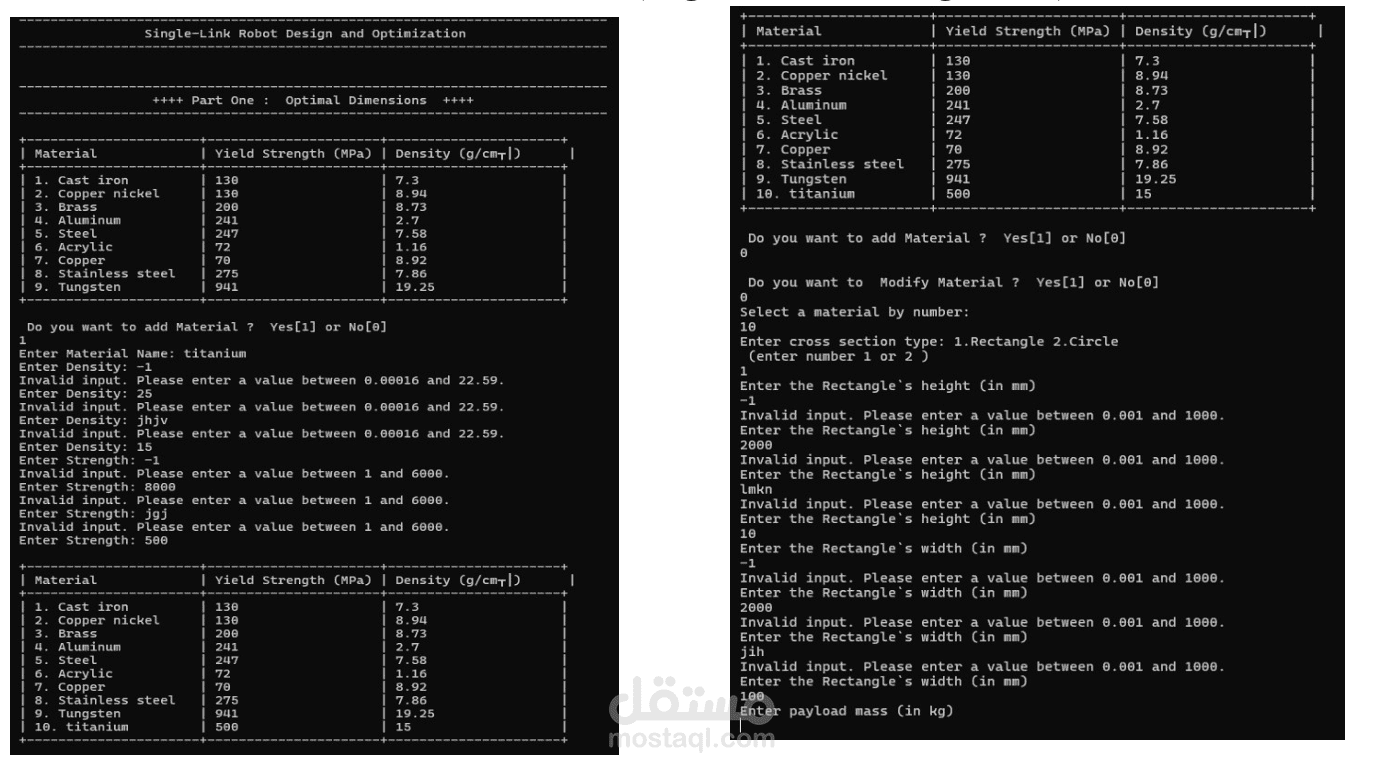
قمت بتطوير مشروع هندسي باستخدام لغة C++ يركز على تصميم وتحسين وصلات الذراع الروبوتية. يدمج النظام بين التحليل الإنشائي وخوارزميات التحسين التكرارية واختيار المحرك وعلبة التروس لتحقيق أداء فعّال وموثوق. يبرز المشروع التطبيق القوي لمهارات حل المشكلات الخوارزمية ومبادئ البرمجة كائنية التوجه (OOP)، مع دمج اعتبارات التصميم الميكانيكي مع الأساليب الحاسوبية.