Combined Lane Detection and YOLO Car Detection
تفاصيل العمل
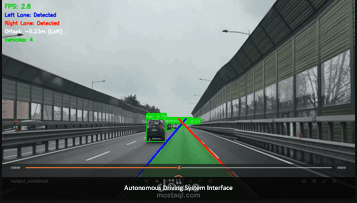
This project combines lane detection with real-time vehicle detection to enhance road scene understanding for autonomous driving applications.
The system uses computer vision techniques to detect lane markings on the road while simultaneously applying the YOLO object detection model to identify vehicles in the scene.
Key Features:
* Lane detection using image processing techniques such as edge detection and Hough Transform.
* Vehicle detection using the YOLO deep learning model.
* Real-time processing of road video or camera input.
* Visualization of detected lanes and vehicles on the same frame.
Technologies Used:
* Python
* OpenCV
* YOLO (You Only Look Once)
* NumPy
This project demonstrates the integration of traditional computer vision methods with deep learning-based object detection to improve road safety and driving assistance systems.