Robotic Arm Chess Player باستخدام Computer Vision وStockfish AI
تفاصيل العمل
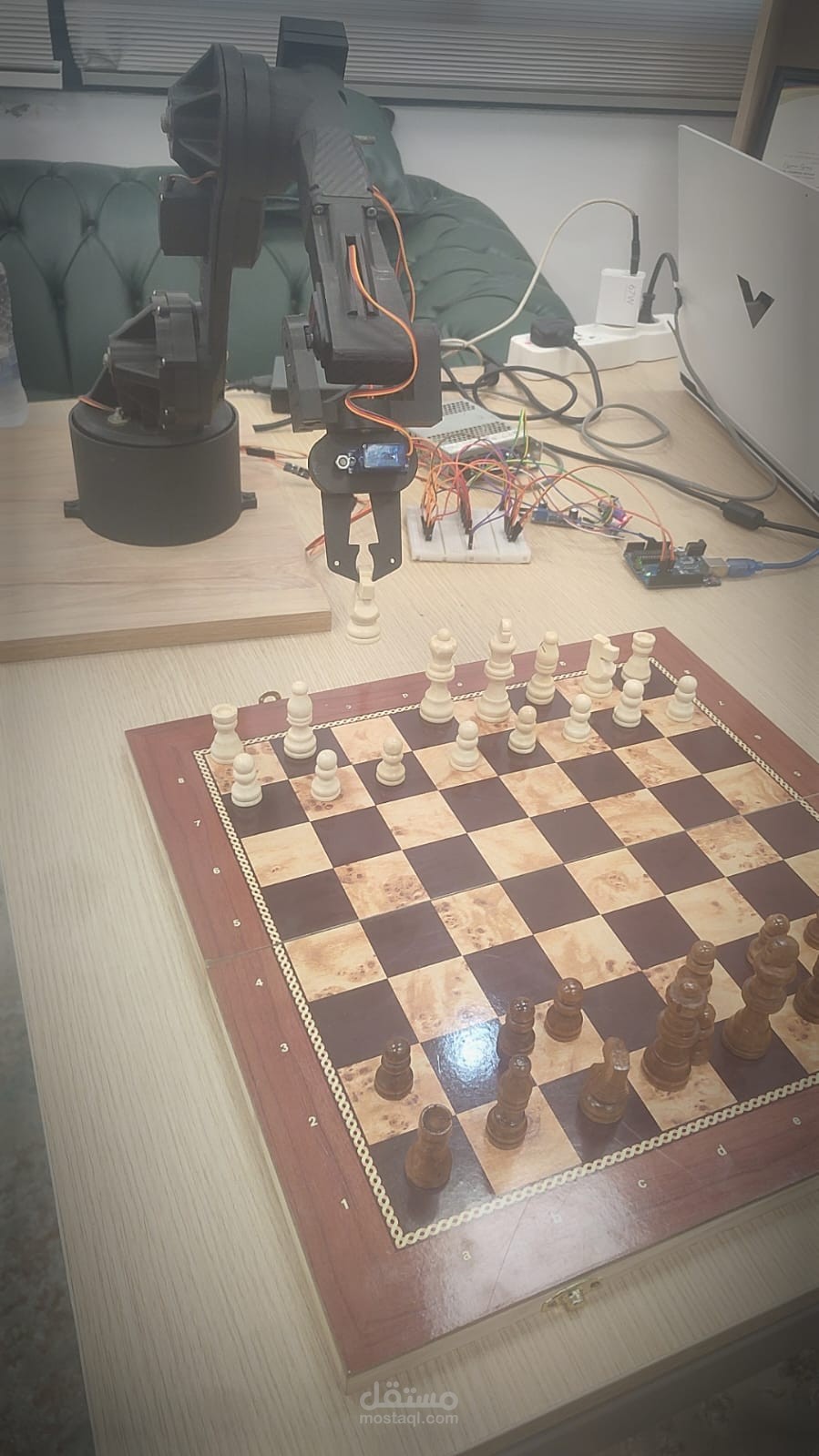
هذا المشروع عبارة عن ذراع روبوتية (Robotic Arm) قادرة على لعب لعبة الشطرنج بشكل ذاتي باستخدام تقنيات الرؤية الحاسوبية (Computer Vision) ومحرك الشطرنج Stockfish. تم تصميم النظام ليتفاعل مع لوحة الشطرنج الحقيقية، حيث يقوم الروبوت بتحليل حركة اللاعب ثم اتخاذ القرار المناسب وتنفيذ الحركة فعليًا على اللوحة.
فكرة عمل النظام
يقوم النظام باستخدام كاميرا لمراقبة لوحة الشطرنج واكتشاف حركة اللاعب. بعد ذلك يتم تحليل وضع القطع على اللوحة باستخدام خوارزميات Computer Vision لاكتشاف القطعة التي تم تحريكها.
يتم إرسال حالة اللوحة إلى محرك الشطرنج Stockfish الذي يقوم بحساب أفضل حركة ممكنة ضد اللاعب.
بعد تحديد الحركة، تقوم الذراع الروبوتية المزودة بعدة Servo Motors بتحريك القطعة المطلوبة على اللوحة وتنفيذ حركة الروبوت في اللعبة.
مكونات النظام:
Robotic Arm باستخدام عدة Servo Motors
كاميرا لمراقبة لوحة الشطرنج
خوارزميات Computer Vision لاكتشاف حركة القطع
محرك الشطرنج Stockfish Chess Engine
نظام تحكم يربط بين الرؤية الحاسوبية والذراع الروبوتية لتنفيذ الحركة
التقنيات المستخدمة
Robotics
Computer Vision
Artificial Intelligence
Servo Motor Control
Chess Engine Integration (Stockfish)
Image Processing
Real-time Board Detection
مميزات المشروع:
دمج الذكاء الاصطناعي مع الأنظمة الروبوتية
اكتشاف حركة اللاعب تلقائيًا باستخدام الكاميرا
اتخاذ القرار باستخدام محرك شطرنج احترافي
تنفيذ الحركة فعليًا باستخدام الذراع الروبوتية
يمثل هذا المشروع تطبيقًا عمليًا يجمع بين الروبوتات والذكاء الاصطناعي والرؤية الحاسوبية لإنشاء نظام قادر على التفاعل مع البيئة الحقيقية واتخاذ قرارات ذكية.