تصميم نموذج لاتخاذ القرار لتحريك روبوت في ممر أحادي البعد باستخدام MDP
تفاصيل العمل
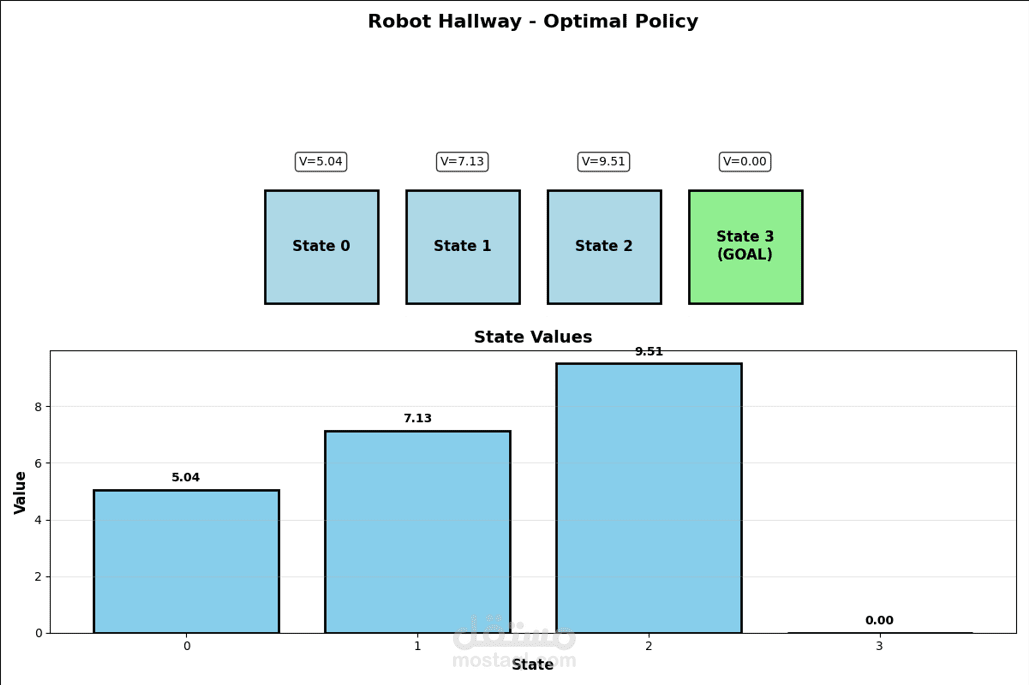
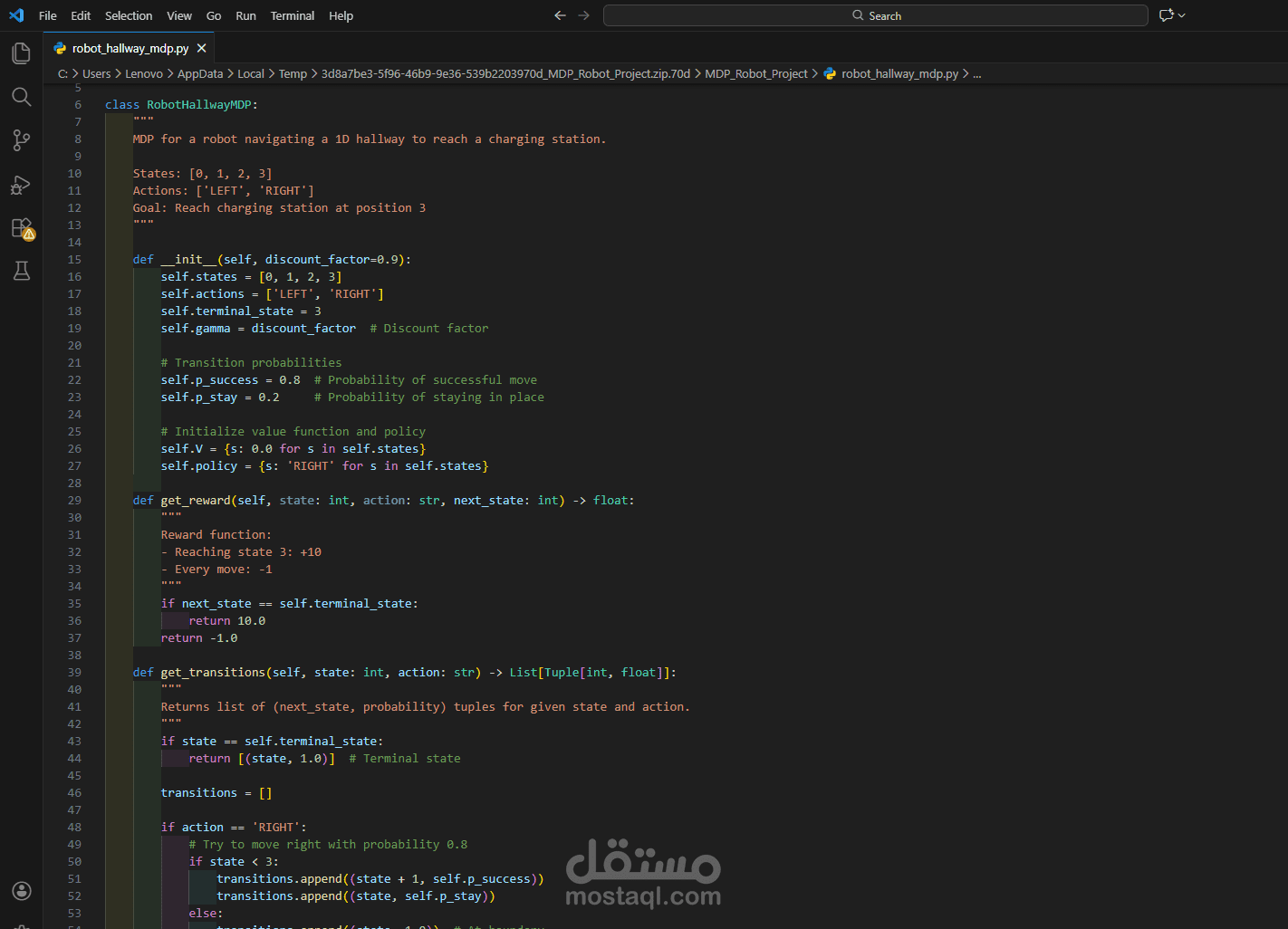
مشروع يعتمد على تصميم نموذج ذكي لتحريك روبوت داخل ممر أحادي البعد (1D Hallway) باستخدام مفهوم Markov Decision Process. يهدف المشروع إلى تدريب الروبوت على اتخاذ قرارات صحيحة للوصول إلى الهدف بأفضل طريقة ممكنة مع تقليل الأخطاء أو الحركات غير الضرورية.
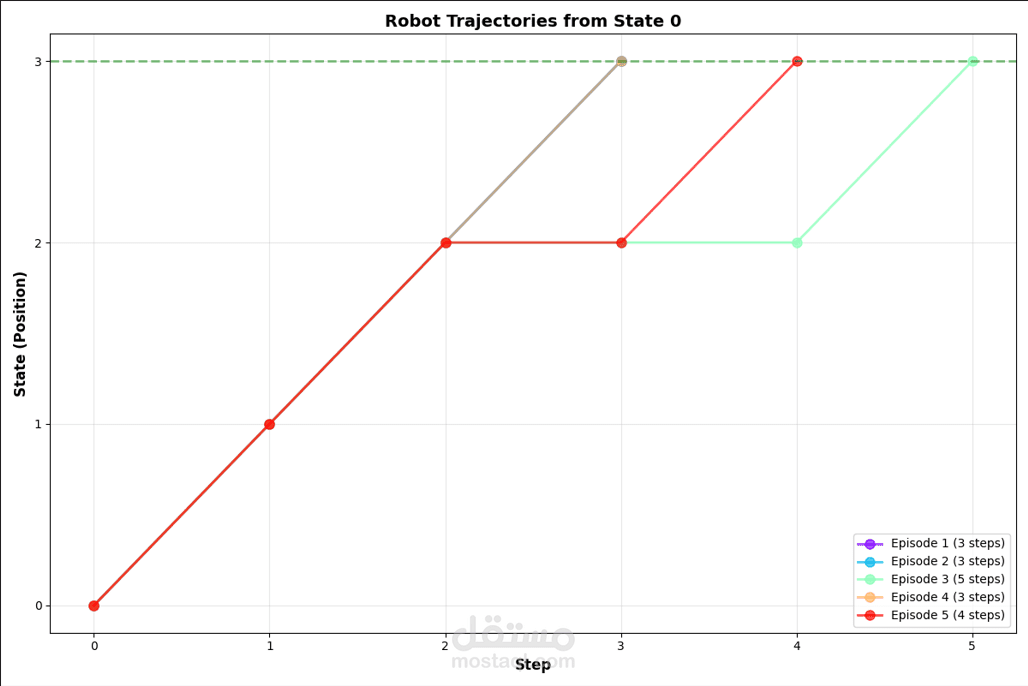
يقوم النموذج بمحاكاة بيئة يتحرك فيها الروبوت بين عدة مواقع داخل الممر، ويختار في كل خطوة الحركة المناسبة (يمين أو يسار) بناءً على احتمالات الانتقال والمكافآت المتوقعة. يعتمد الحل على تقنيات من مجال Reinforcement Learning وArtificial Intelligence لتحليل الحالات المختلفة وتحديد أفضل سياسة (Policy) لاتخاذ القرار.