Object Detection
تفاصيل العمل
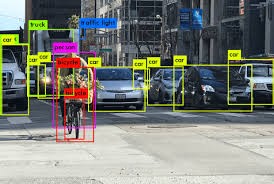
Object and Lane Detection is a computer vision project developed to detect road lanes and surrounding objects from driving videos using image processing and deep learning techniques. The system is designed to simulate a basic perception module used in autonomous driving and intelligent transportation systems.
The project processes road images or video frames and applies lane detection algorithms to identify lane markings on the road. At the same time, an object detection model is used to recognize vehicles and other road objects. Combining both detections provides a clearer understanding of the driving environment and helps analyze road conditions. Lane detection systems are an essential component of modern driver assistance and self-driving technologies.
The workflow begins by capturing frames from a video or camera input. The frames are then preprocessed using computer vision techniques such as edge detection and region-of-interest extraction to highlight lane lines. Lane detection algorithms identify the left and right lane boundaries, while the object detection module detects nearby vehicles or obstacles. The results are displayed with visual overlays showing lane lines and detected objects.
This project demonstrates how computer vision techniques can be combined to understand road scenes and support intelligent driving applications.
Technologies used in this project include Python, OpenCV, deep learning models for object detection, and computer vision algorithms for lane detection.