روبوت متنقل بعجلات Mecanum ونظام تحكم ROS للقيادة متعددة الاتجاهات
تفاصيل العمل
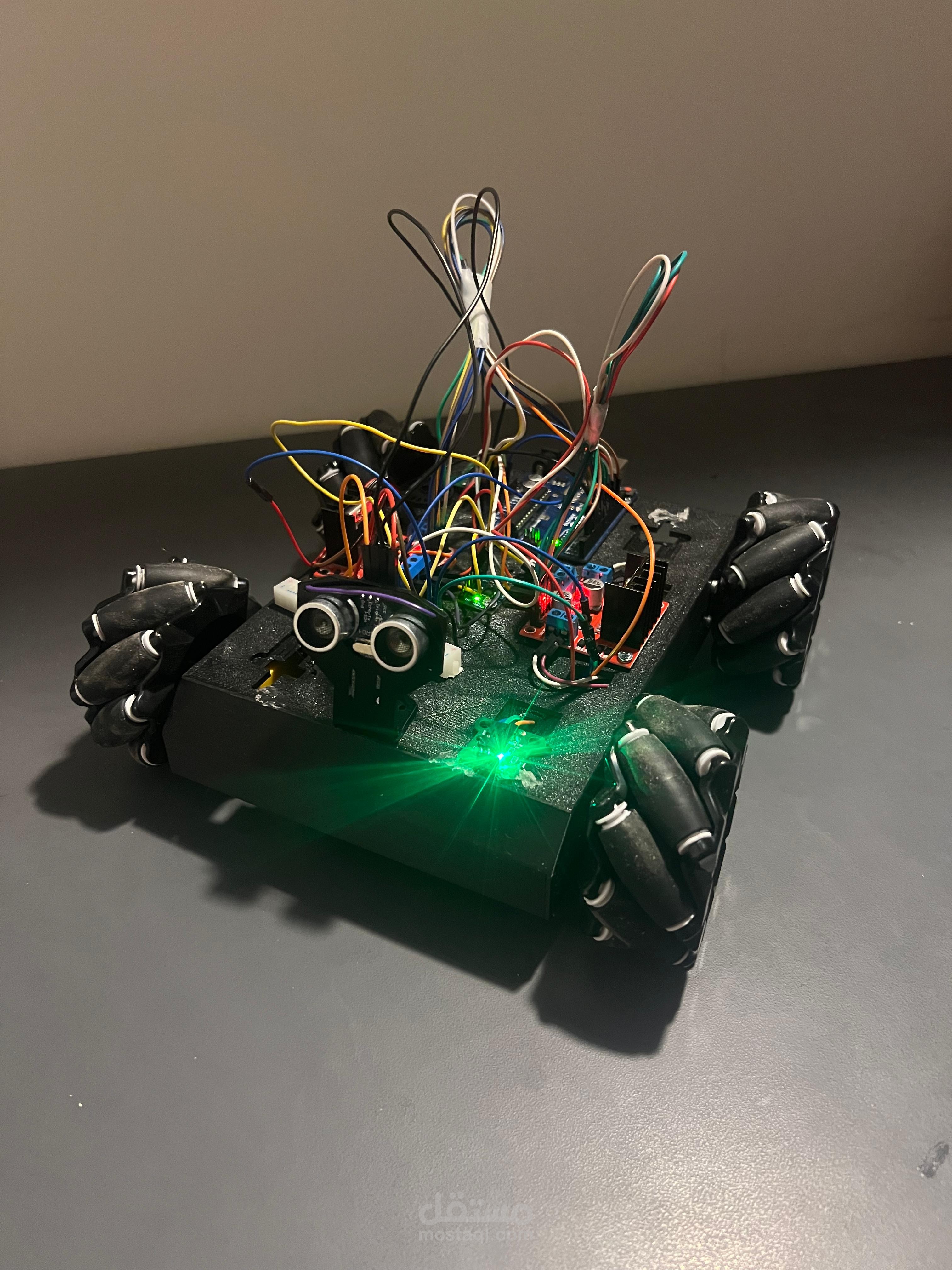
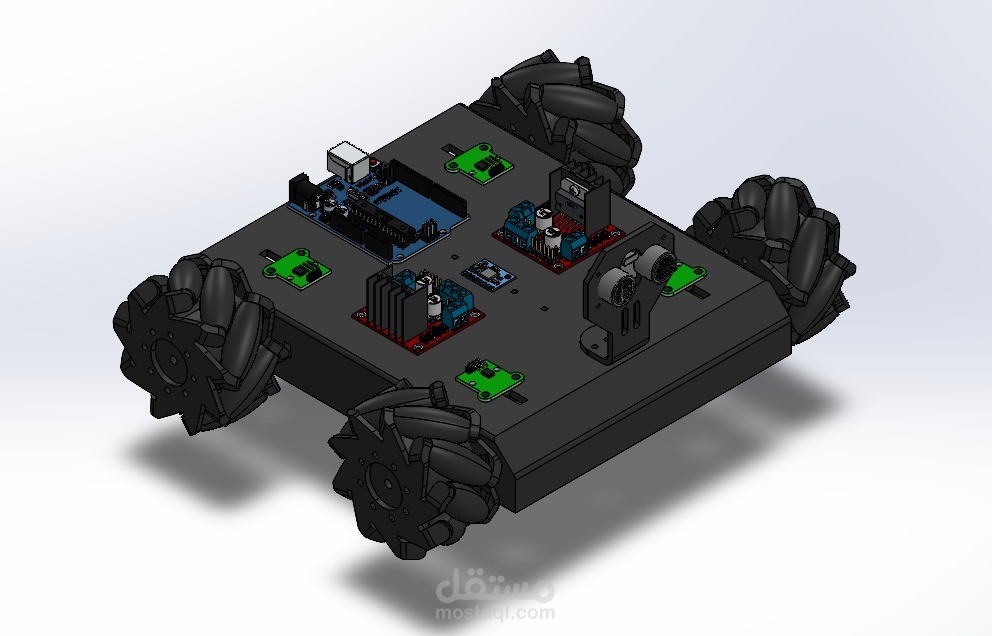
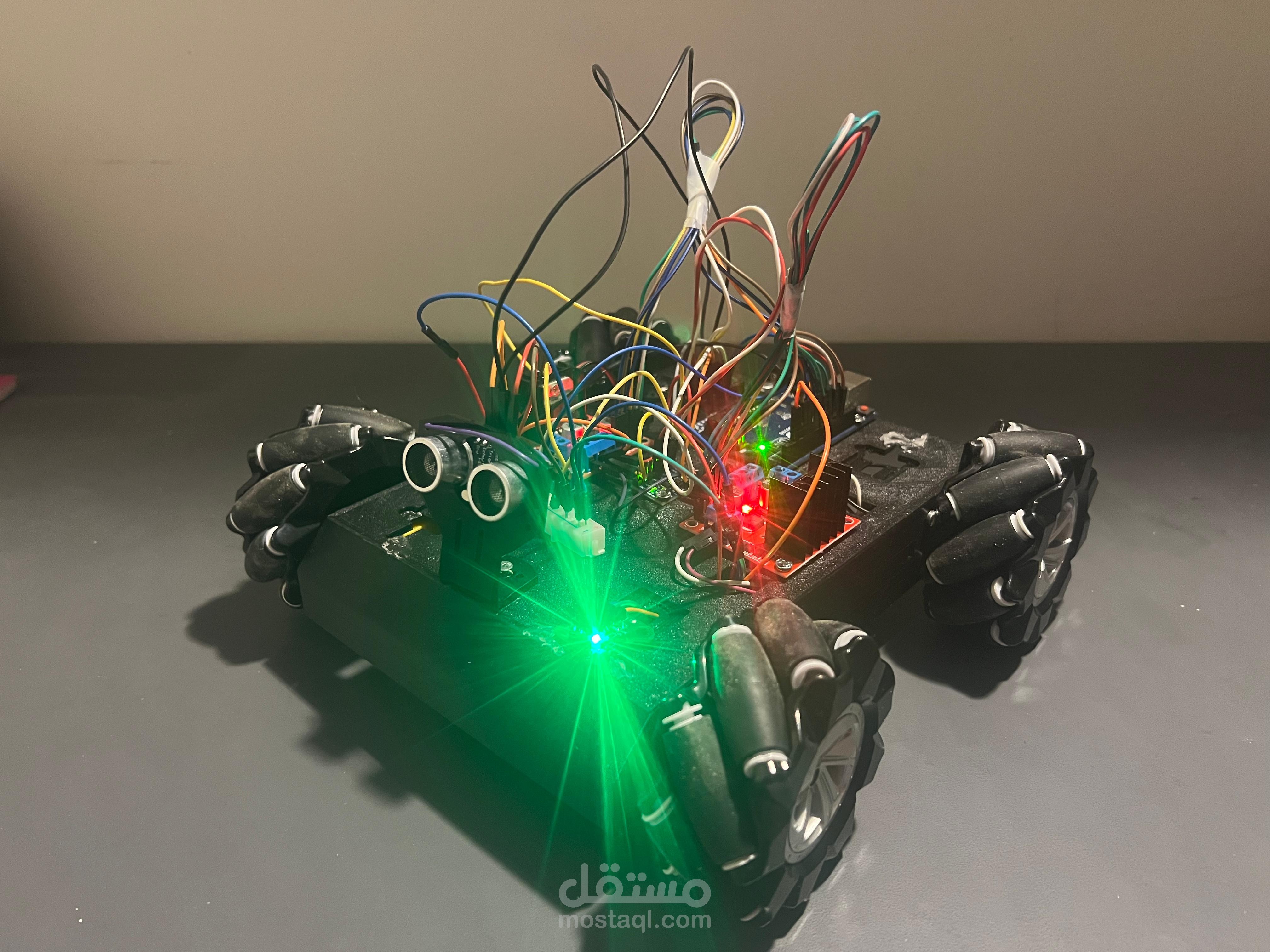
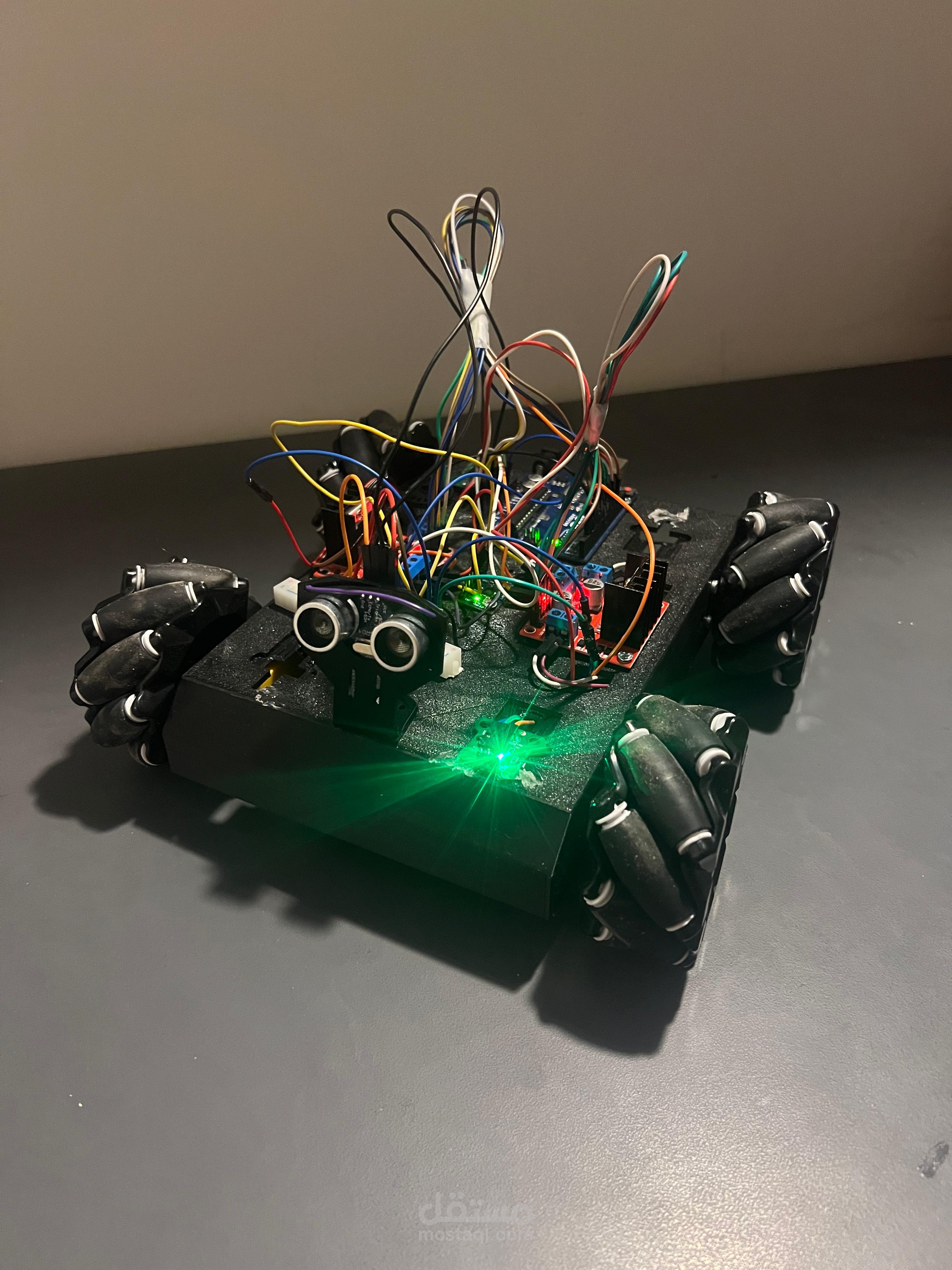
في عالم الروبوتات المتنقلة، القدرة على المناورة في المساحات الضيقة تمثل تحديًا كبيرًا. في هذا المشروع، قمت بتصميم وتنفيذ روبوت متنقل يعتمد على عجلات Mecanum، وهي عجلات خاصة تسمح للروبوت بالتحرك في أي اتجاه (أمامي، جانبي، قطري، والدوران حول نفسه) بدون الحاجة لنظام توجيه معقد. الهدف كان بناء منصة اختبار متكاملة يمكن استخدامها لتطوير تطبيقات الملاحة الذاتية والتحكم المتقدم.