marine guardian
تفاصيل العمل


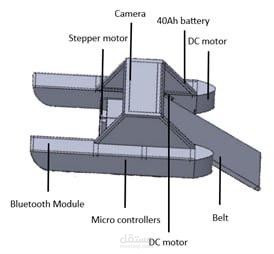
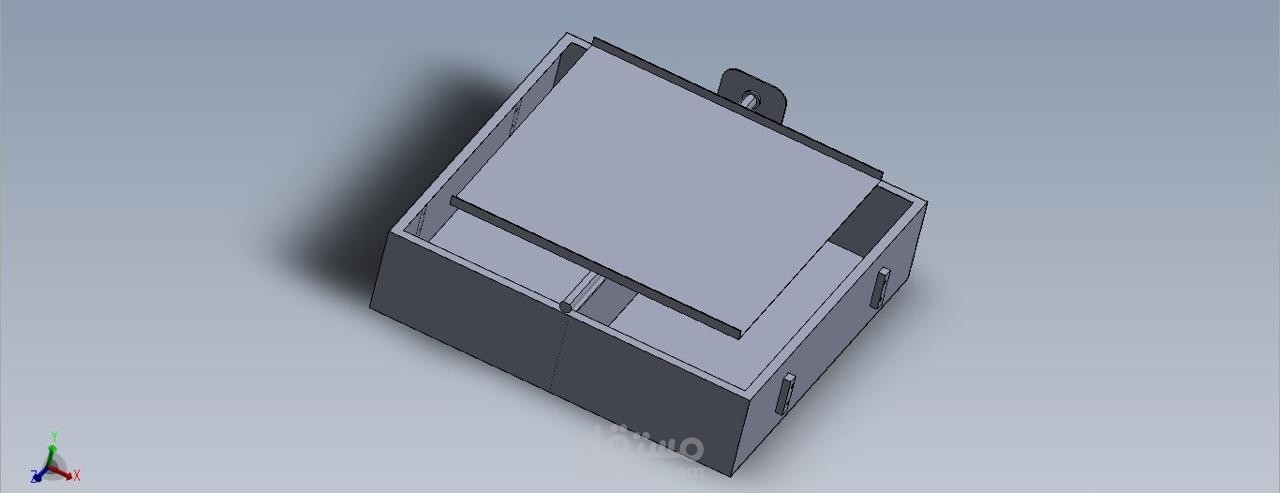
نظام روبوتي بحري ذاتي القيادة مصمم لتطهير المسطحات المائية من النفايات باستخدام تقنيات الذكاء الاصطناعي وإنترنت الأشياء (IoT). يعتمد المشروع على هيكلية تحكم هجين (Master-Slave Architecture) لتحقيق أقصى كفاءة في الملاحة، والتعرف على الأجسام، وفرز النفايات آلياً، مع منصة تحكم سحابية متكاملة للمراقبة والتحكم اليدوي.
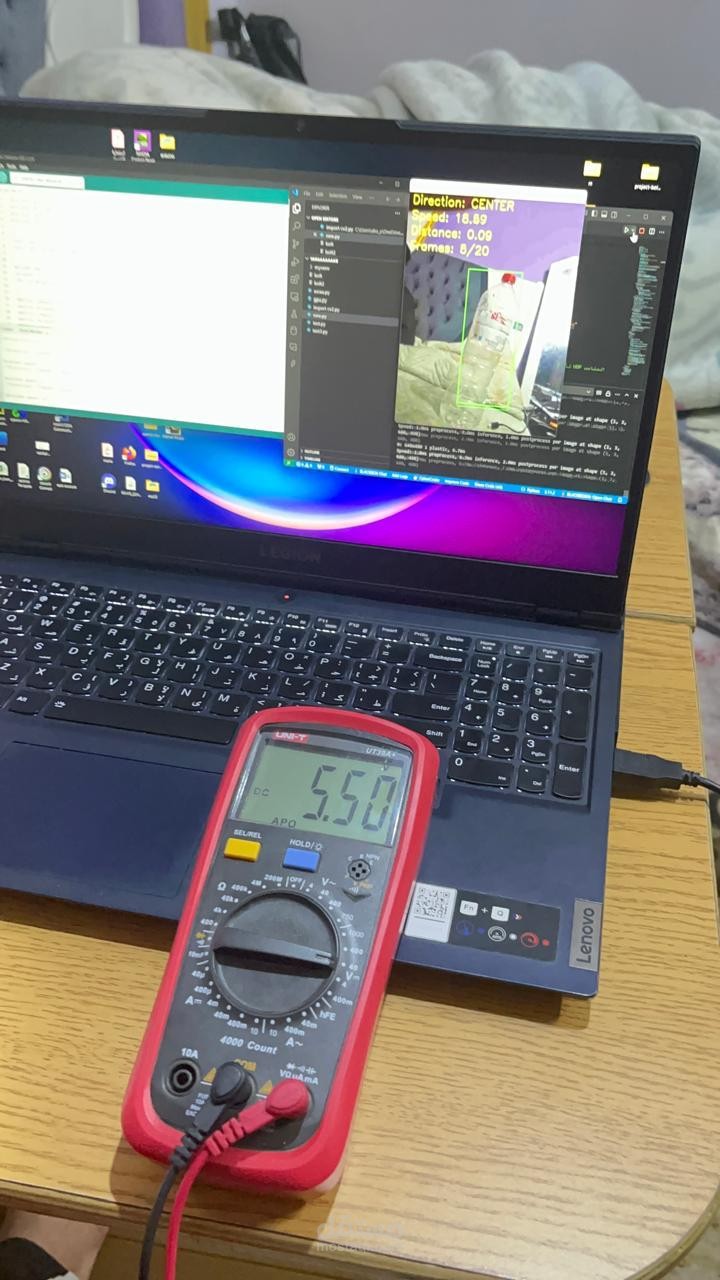
المواصفات التقنية والابتكارات:نظام الملاحة والمسح الذكي: يعمل المركب بنمط تحرك "Zig-zag" لضمان تغطية كاملة للمساحة المائية، مدعوماً بكاميرا رؤية حاسوبية (Computer Vision) تتحرك بزاوية $180^{\circ}$ لمسح المحيط واكتشاف النفايات بدقة.هيكلية التحكم المزدوجة (Master-Slave Architecture):المدير (Master Controller): يعمل كحلقة وصل مع السيرفر السحابي لاستقبال أوامر الملاحة بناءً على تحليل نموذج الذكاء الاصطناعي (AI Model) لموقع النفايات.التابع (Slave Controller): مسؤول عن المهام اللوجستية والميكانيكية، مثل مراقبة مستوى البطاريات، قياس سرعة المركب، إدارة نظام "سير الالتقاط"، وفرز النفايات آلياً داخل الحاوية بناءً على نوعها.تكامل الذكاء الاصطناعي (AI & Server Integration): يتم معالجة البيانات البصرية على سيرفر خارجي يحدد إحداثيات النفايات بدقة، ثم يرسل أوامر فورية للمركب لتعديل المسار والسرعة للوصول للهدف.نظام الالتقاط والفرز الآلي: بمجرد اقتراب المركب من الهدف بمسافة محددة، يتم تفعيل نظام الالتقاط الذكي، وتسجيل كل قطعة تدخل الحاوية مع مراقبة مستوى امتلاء الحاوية لحظياً.المنصة السحابية ولوحة التحكم (Cloud Dashboard):تتضمن المنصة نظاماً بيئياً متكاملاً يشمل:المراقبة اللحظية: بث مباشر (Live Streaming) من كاميرا المركب مع تتبع حي للموقع الجغرافي (GPS) والتقدم المحرز.لوحة التحكم الإدارية: إمكانية التدخل اليدوي الكامل في حركة المركب، وإدارة بيانات المتطوعين، والتدفقات المالية (التبرعات)، وتقييم الشركاء.التفاعل المجتمعي: واجهة للمستخدمين تتيح التبرع والتطوع، مما يحول المشروع من مجرد أداة تقنية إلى مبادرة بيئية متكاملة.أبرز التقنيات المستخدمة (Tech Stack):AI/ML: Object Detection, Computer Vision.Embedded Systems: Master-Slave Communication, Motor Control, Sensors Management.IoT & Web: Real-time Data Streaming, GPS Tracking, Cloud Dashboard.