في منزلي
تفاصيل العمل
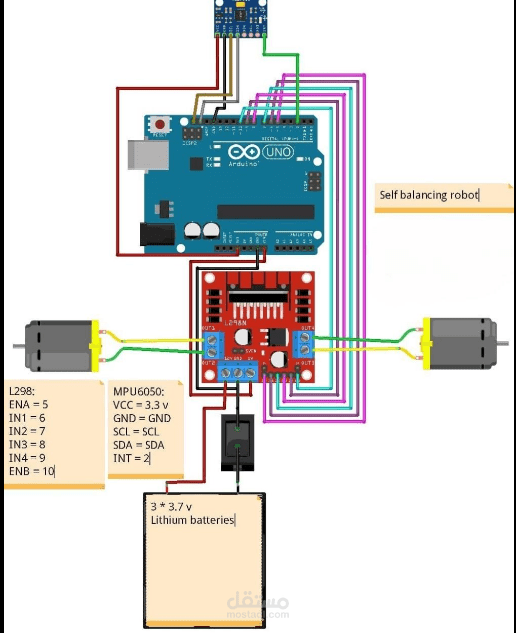
Designed and implemented a self-balancing robot based on control systems principles.
The robot uses sensor data (such as a gyroscope and accelerometer) to maintain balance in real time through feedback control.
Worked on both the hardware and software aspects, including sensor integration, motor control, and tuning the control algorithm to achieve stable and responsive balancing behavior.
This project strengthened my understanding of embedded systems, control theory, and the interaction between hardware and software in real-world applications.