From Logic Programming to Real-World Planning: Autonomous Hospital Robot Web System
تفاصيل العمل
where we applied Symbolic AI and Logic Programming to build an autonomous delivery robot for a hospital environment.
Instead of traditional imperative coding, we designed a reasoning-based planner using Prolog, then integrated it into a web-based interactive application that allows users to configure states and generate plans in real time.
Problem Scenario :
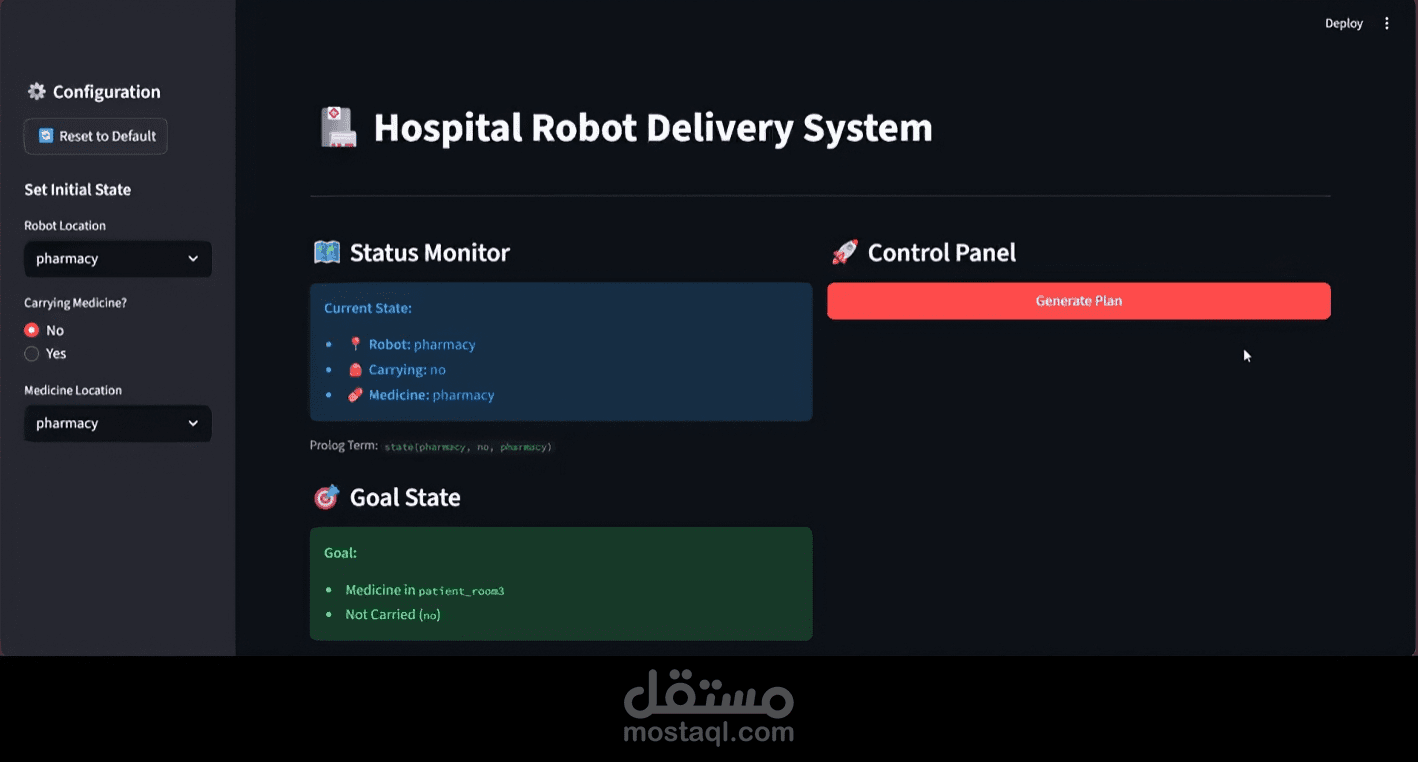
The robot must autonomously deliver medicine from the Pharmacy → Patient Room 3 by:
• Planning valid paths
• Tracking state changes
• Enforcing safety rules
• Rejecting invalid actions
System Design :
• State Representation → state(RobotLoc, Carrying, MedicineLoc)
• Actions → Move, Pick Up, Drop
• DFS Planning → automatic path generation
• Safety Constraints → e.g. medicine cannot be dropped in the corridor
Interactive Web App :
• Built with Streamlit
• Real-time state monitoring
• Plan visualization
• Action simulation & testing