Hand Skeleton Tracker
تفاصيل العمل
نوع العمل
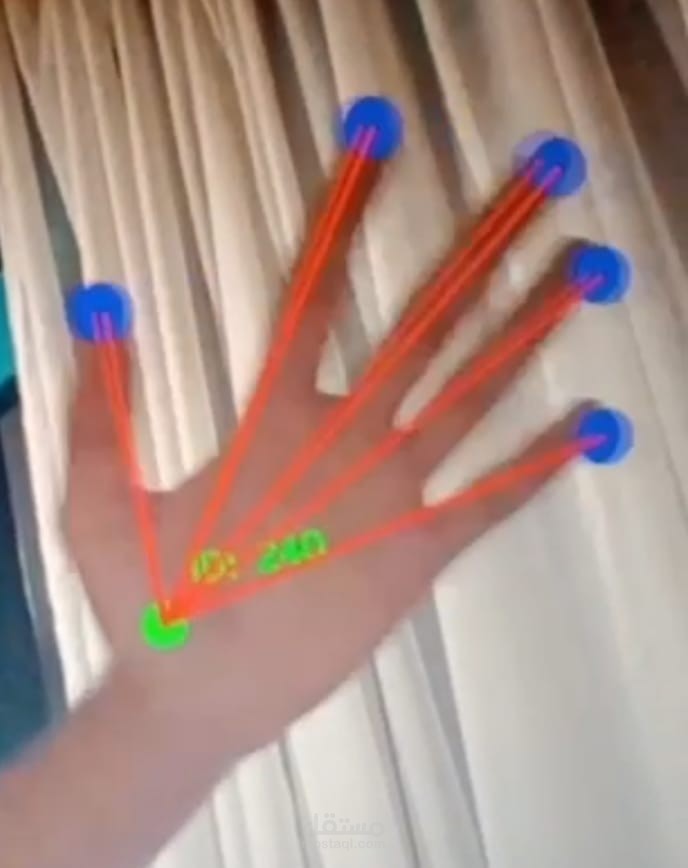
تطوير نظام رؤية حاسوبية (Computer Vision System) لتتبع اليد وتحليل حركة الأصابع في الزمن الحقيقي باستخدام Python و OpenCV، مع إمكانية ربطه بأنظمة روبوتية لإرسال أوامر تحكم بناءً على اتجاه الإشارة.
ميزات العمل
يعمل في الزمن الحقيقي (Real-Time Processing)
يدعم تتبع أكثر من يد في نفس الوقت
استخدام Kalman Filter لتقليل الاهتزاز وزيادة الثبات
كشف لون البشرة باستخدام YCrCb لزيادة الدقة في ظروف الإضاءة المختلفة
استخراج أطراف الأصابع باستخدام Convex Hull و Convexity Defects
تحليل اتجاه الإشارة (Pointing Direction Detection)
إمكانية التكامل مع روبوت أو أي نظام تحكم عبر Serial أو UDP
كود منظم بأسلوب OOP لسهولة التطوير والتوسعة
طريقة التنفيذ
التقاط الفيديو من الكاميرا باستخدام OpenCV.
تحويل الإطار إلى مساحة الألوان YCrCb لاستخراج منطقة الجلد.
تطبيق عمليات Morphological لمعالجة الضوضاء.
استخراج الـ Contours الخاصة باليد.
تحديد مركز راحة اليد وأطراف الأصابع باستخدام التحليل الهندسي.
استخدام Kalman Filter لتثبيت وتتبع الإحداثيات عبر الزمن.
تحليل اتجاه الإصبع الممتد لاستخراج متجه الإشارة.
إرسال أمر تحكم للروبوت بناءً على الاتجاه المحسوب.