الروبوت العنكبوتي سداسي الارجل ذو التحكم الذكي
تفاصيل العمل


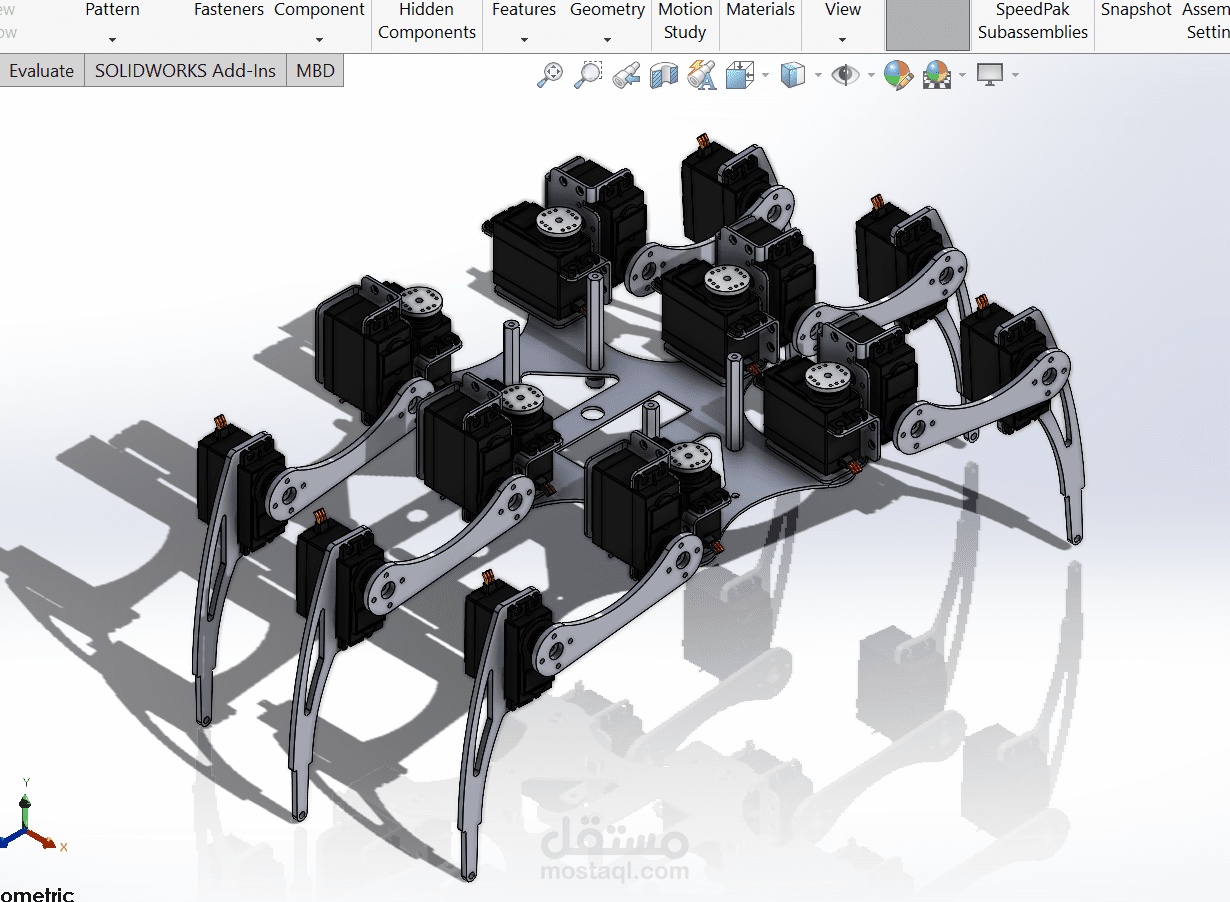
روبوت سداسي الأرجل (Hexapod Robot): تصميم وبرمجة الروبوت للتحكم في الحركة باستخدام Raspberry Pi وIMU وServos، مع نظام PID لتحقيق توازن مستقر.