AI Search algorithms
تفاصيل العمل

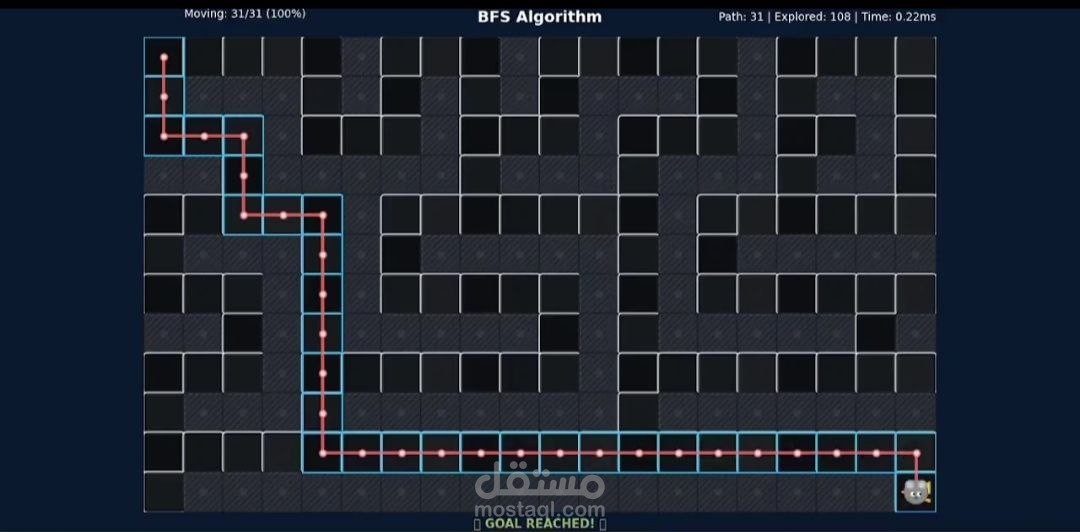




في هذا المشروع، تم تصميم بيئة متاهة حيث يتنقل وكيل افتراضي من نقطة البداية إلى الهدف، مواجهًا الجدران والعوائق على طول الطريق. قمنا بتطبيق ومقارنة الخوارزميات التالية:
• البحث بالعرض أولًا (BFS): يستكشف المتاهة مستوىً تلو الآخر، ضامنًا أقصر مسار، ولكنه قد يستكشف العديد من العقد.
• البحث بالعمق أولًا (DFS): يتعمق في المسارات أولًا، مستخدمًا ذاكرة أقل، ولكنه قد لا يجد أقصر مسار.
• البحث بالعمق التكراري (IDS): يجمع بين عمليات البحث بالعمق أولًا المحدودة العمق بشكل تكراري، مع تحقيق التوازن بين استخدام الذاكرة والشمولية.
• البحث بالتكلفة الموحدة (UCS): يوسع المسار الأقل تكلفة أولًا، ضامنًا المسارات المثلى عند اختلاف التكاليف.
• خوارزمية A*: تستخدم أساليب استدلالية لتوجيه الاستكشاف بكفاءة، وغالبًا ما تجد المسارات المثلى أسرع من البحث بالتكلفة الموحدة.