Gesture-Based Robotic Arm Control System Using Computer Vision
تفاصيل العمل
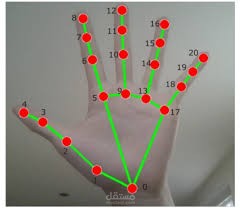
Designed and implemented a robotic arm control system using hand gesture recognition via computer vision.
The system detects hand gestures (open/close, directional movement) and translates them into servo motor commands through Arduino communication.