إصبع إلكتروني يمكن ارتداؤه يتم التحكم فيه بإشارات العضلات (EMG)
تفاصيل العمل
قمت بتطوير إصبع ميكانيكي يمكن ارتداؤه يعمل بناءً على إشارات التخطيط الكهربي للعضلات (EMG)، مما يخلق جسراً تفاعلياً بين حركة الإنسان والأطراف الصناعية الروبوتية. يقوم النظام بقراءة النبضات الكهربائية العضلية الخام ومعالجتها لتشغيل الطرف الصناعي بدقة.
تضمنت مسؤولياتي في هذا المشروع:
+1
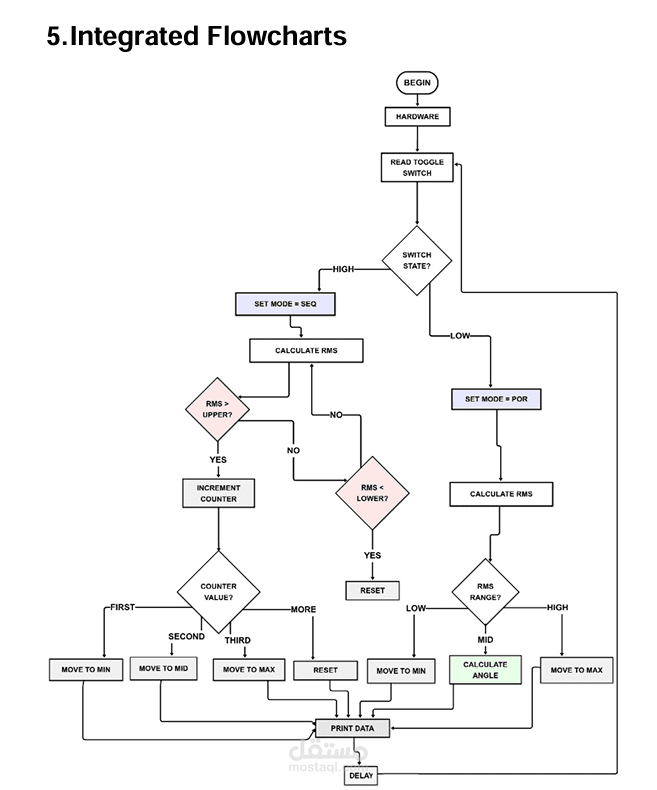
معالجة الإشارات (Signal Processing): تطبيق تقنيات متقدمة لتنقية إشارات EMG من التشويش، بالإضافة إلى حسابات الجذر التربيعي للمتوسط (RMS) لاستخراج البيانات الدقيقة لقوة العضلة.
+1
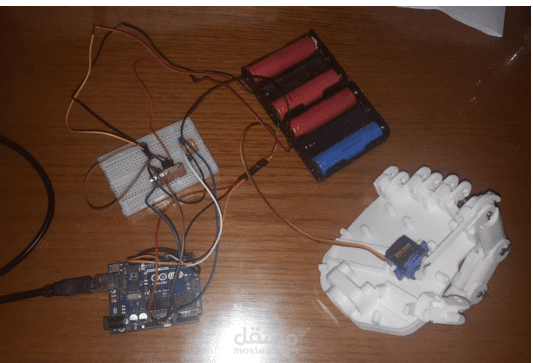
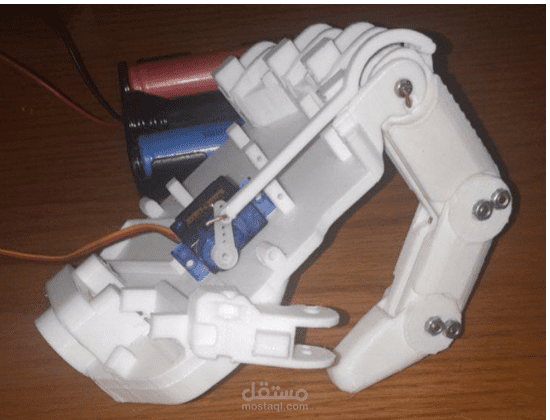
برمجة النظم المدمجة: برمجة متحكم Arduino Uno لترجمة نشاط العضلات إلى حركات فيزيائية دقيقة عبر محرك سيرفو (Servo Motor).
+2
خوارزميات التحكم: تطوير أنظمة تحكم تعتمد على وضعين: "وضع متسلسل" (Sequential) يعتمد على تخطي عتبة محددة للإشارة، و"وضع تناسبي" (Proportional) يحاكي قوة العضلة لضبط زاوية المحرك بشكل مستمر.
+3
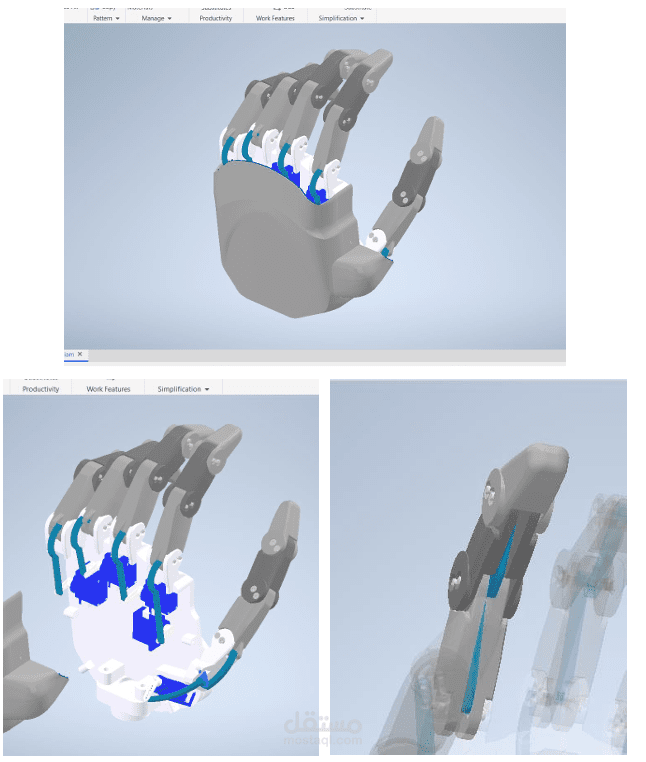
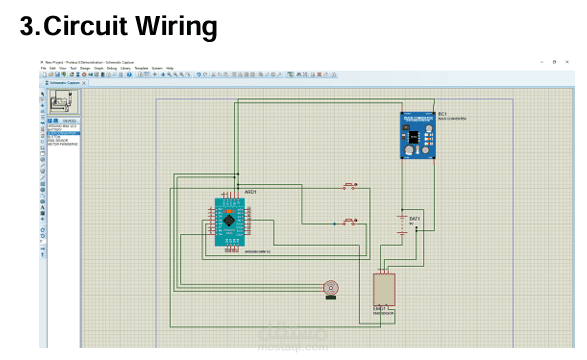
التصميم الميكانيكي والإلكتروني: تنفيذ التصميم الميكانيكي ثلاثي الأبعاد (3D CAD) لآلية حركة الإصبع، وتصميم وربط الدوائر الإلكترونية المتكاملة لضمان استقرار النظام.