روبوت ديكارتي ثلاثي المحاور للتجميع والفرز الآلي
تفاصيل العمل
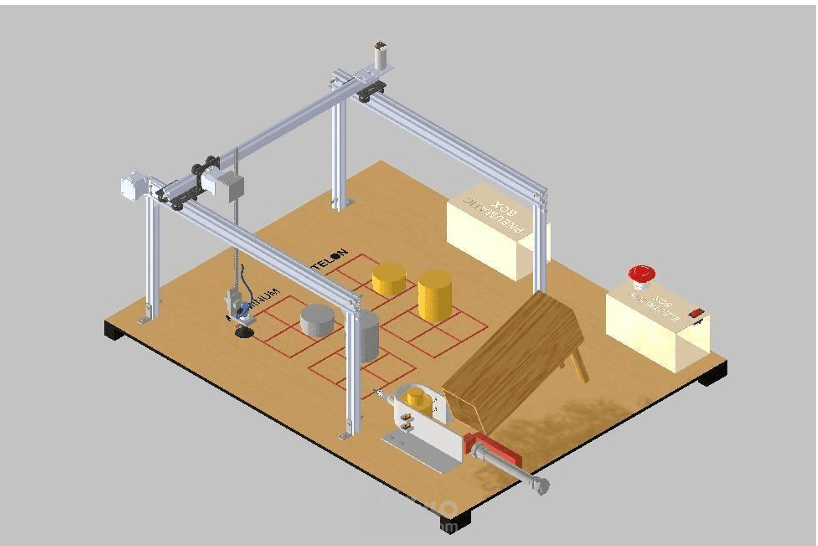
قمت بتصميم ومحاكاة وبناء خط إنتاج آلي بالكامل قادر على التعامل مع عمليات التصنيع متعددة المراحل. جوهر النظام هو روبوت ديكارتي ثلاثي المحاور مصمم خصيصاً لتنفيذ ثلاث عمليات رئيسية: تجميع منتج مكون من جزأين (غطاء وقاعدة)، فرز المكونات بناءً على المادة (ألومنيوم أو أرتيلون) والارتفاع، ووضع التجميعات النهائية في محطة عمل مكونة من 8 خانات.
شمل المشروع دورة التطوير كاملة:
+2
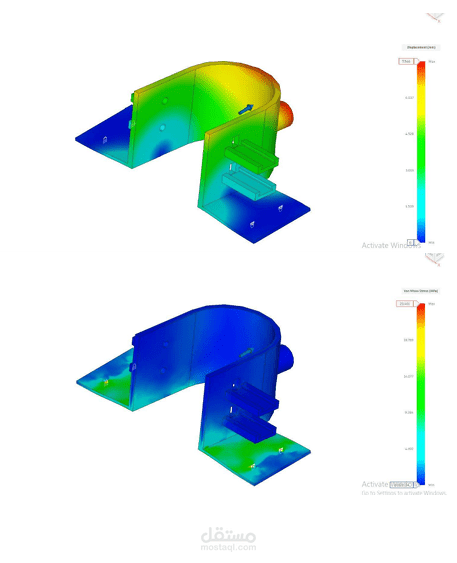
التصميم الميكانيكي: إنشاء نماذج ثلاثية الأبعاد (3D CAD) لجميع الأجزاء.
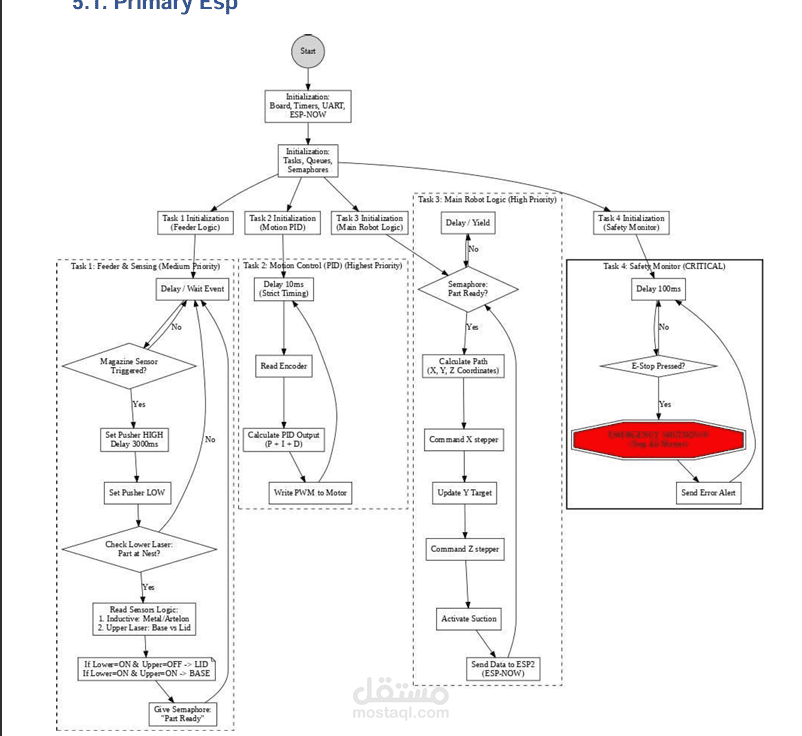
نظام التحكم: تطوير بنية تحكم موزعة باستخدام متحكمات ESP32 تعمل بنظام التشغيل الفوري FreeRTOS وتتواصل لاسلكياً عبر بروتوكول ESP-NOW.
المحركات والتحكم الدقيق: دمج محركات خطوية (Stepper Motors) ومحرك تيار مستمر (DC Motor) مع تصميم نظام تحكم تناسبي تكاملي تفاضلي (PID) دقيق لمحور Y لضمان حركة سلسة وبدون تجاوز للهدف (Overshoot).
+1
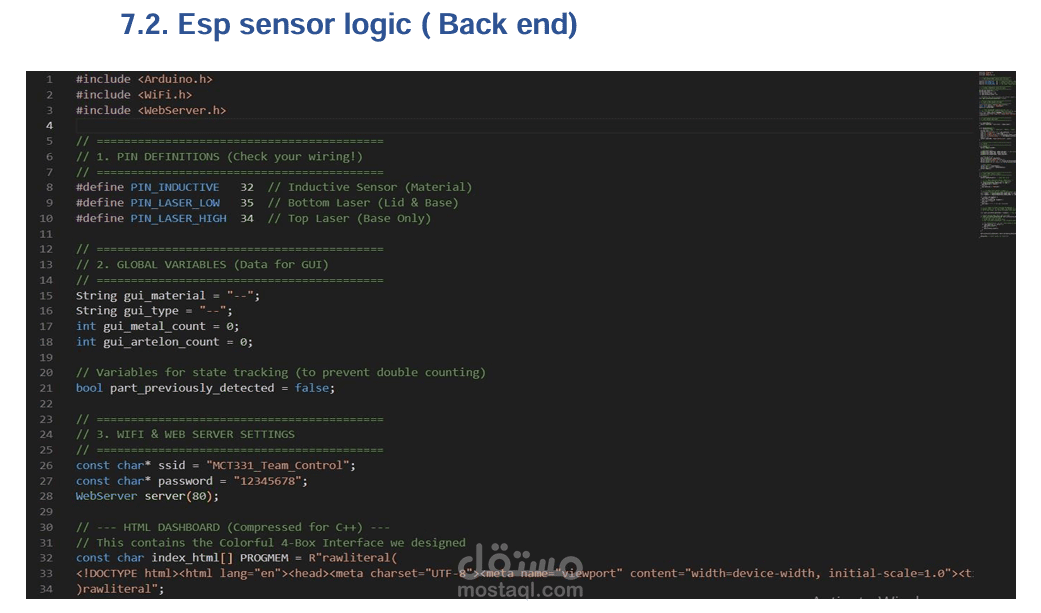
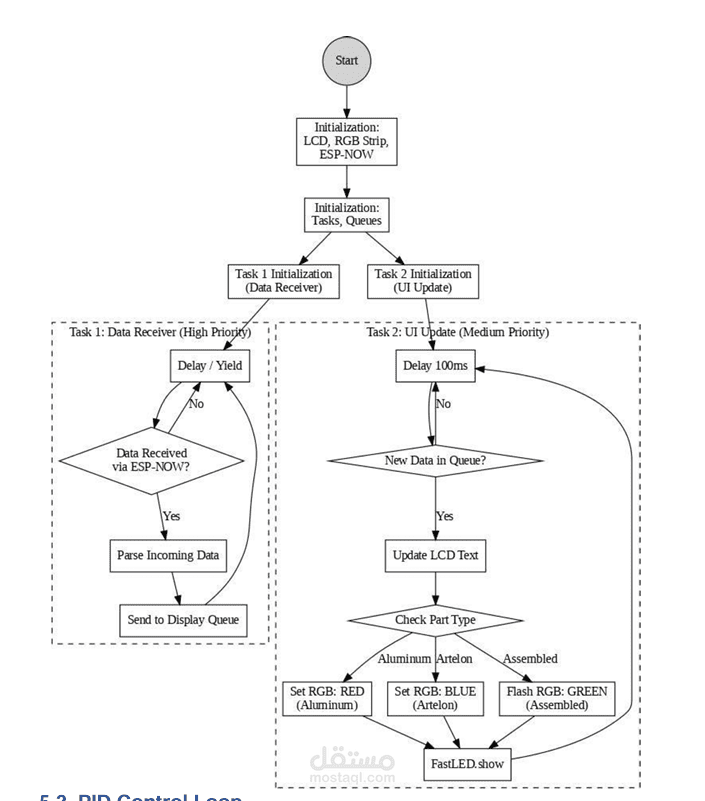
واجهة المستخدم (GUI): برمجة واجهة ويب تفاعلية لعرض إحصائيات الإنتاج (نوع المادة والعدد) لحظة بلحظة، بالإضافة إلى نظام إضاءة ذكي (RGB LEDs) لتوضيح حالة كل خانة في محطة العمل