نظام ذكاء اصطناعي لتخطيط مهام الروبوت (AI Task Planning) باستخدام Python و Prolog
تفاصيل العمل
في هذا المشروع، قمت بتصميم نظام متكامل لمحاكاة "تخطيط المهام" للروبوتات، حيث يعتمد الروبوت على منطق برمجي لاتخاذ قراراته للوصول إلى هدف محدد (نقل غرض من مكان لآخر) بأقل عدد من الخطوات وبدون أخطاء.
المميزات التقنية الفريدة للمشروع:
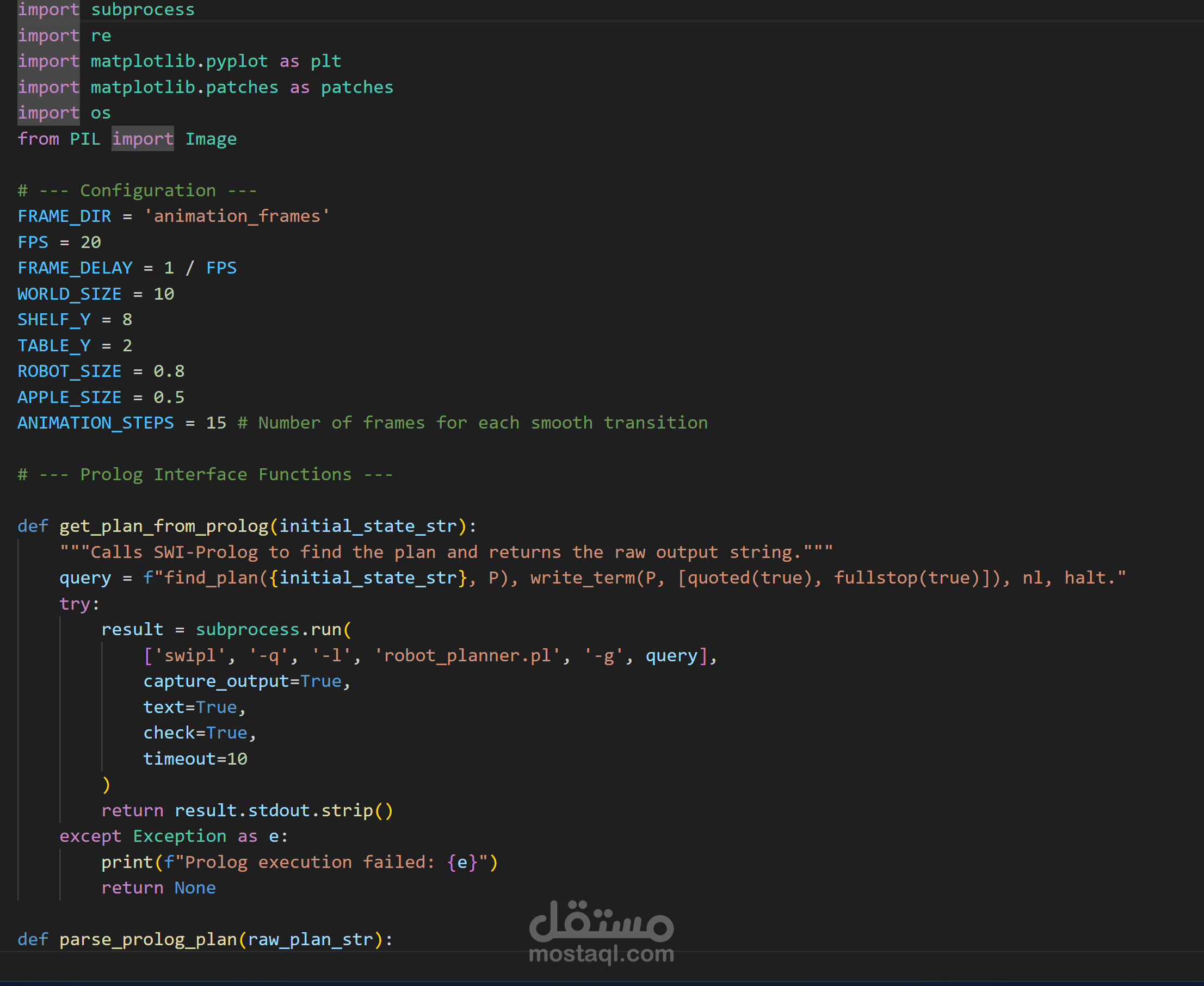
تكامل اللغات (Integration): الربط بين لغة Prolog (المتخصصة في المنطق والاستنتاج) ولغة Python (المتخصصة في العرض والتحكم).
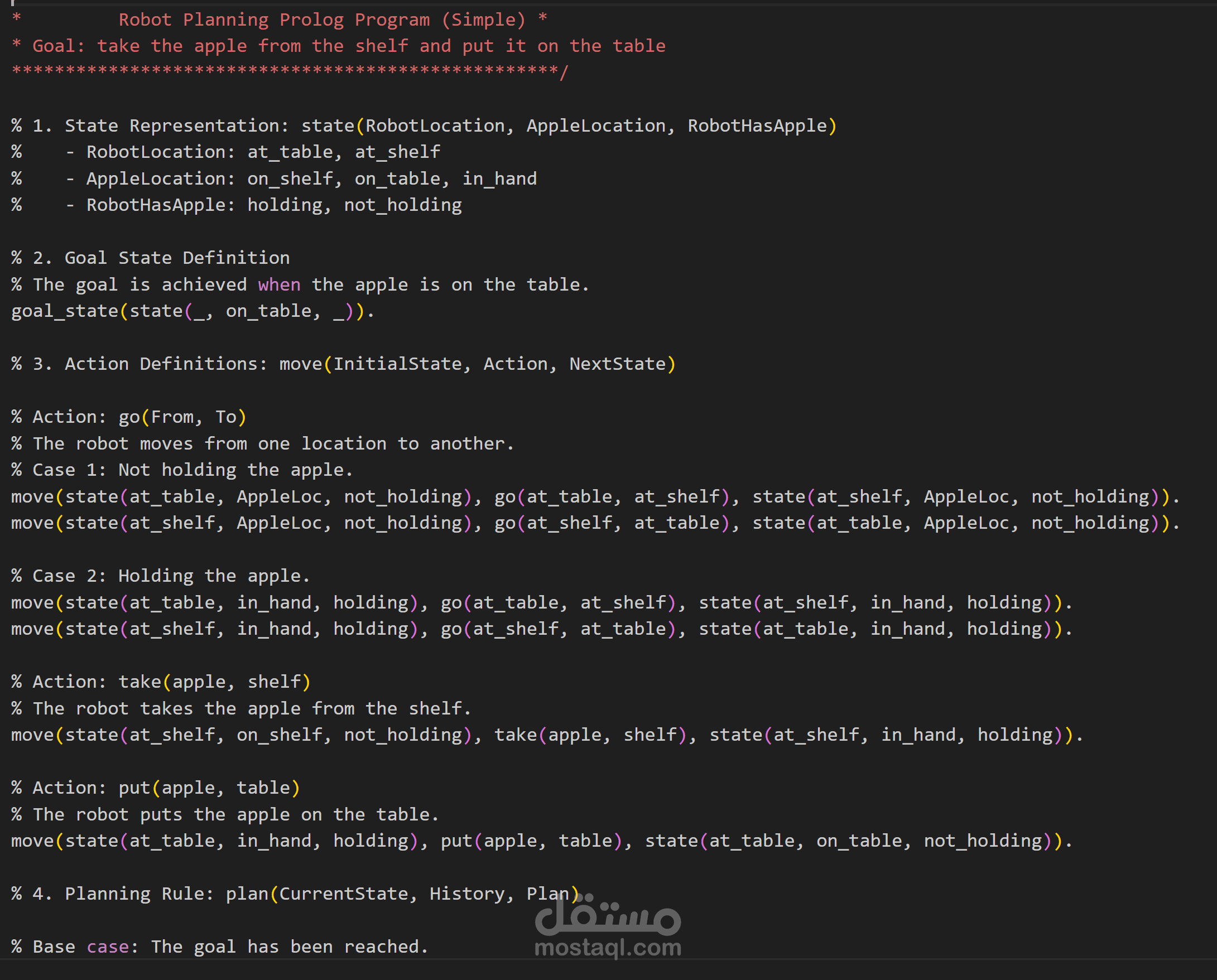
محرك التخطيط (Planning Engine): بناء خوارزمية البحث في Prolog التي تقوم بتحليل "الحالة الراهنة" (Initial State) والوصول إلى "الحالة الهدف" (Goal State) وتوليد خطة عمل (Plan) أوتوماتيكية.
المحاكاة البصرية (Visual Animation): تحويل الخطة المنطقية إلى رسوم متحركة (GIF) باستخدام مكتبة Matplotlib في بايثون، لتوضيح حركة الروبوت خطوة بخطوة بشكل سلس.
إدارة الحالات (State Management): الكود يتعامل مع متغيرات معقدة مثل موقع الروبوت، حالة الغرض (محمول أو على الطاولة)، وتجنب الحلقات التكرارية (Cycles) أثناء التخطيط.
الأدوات المستخدمة (Tech Stack):
SWI-Prolog: لبناء محرك الذكاء الاصطناعي والقواعد المنطقية.
Python: كبيئة تشغيل وسيطة ومحرك للرسوم.
Matplotlib & PIL: لتوليد الإطارات (Frames) وتحويلها إلى رسوم متحركة.
Subprocess & Regex: للربط البرمجي ومعالجة البيانات بين بايثون وبرولوغ