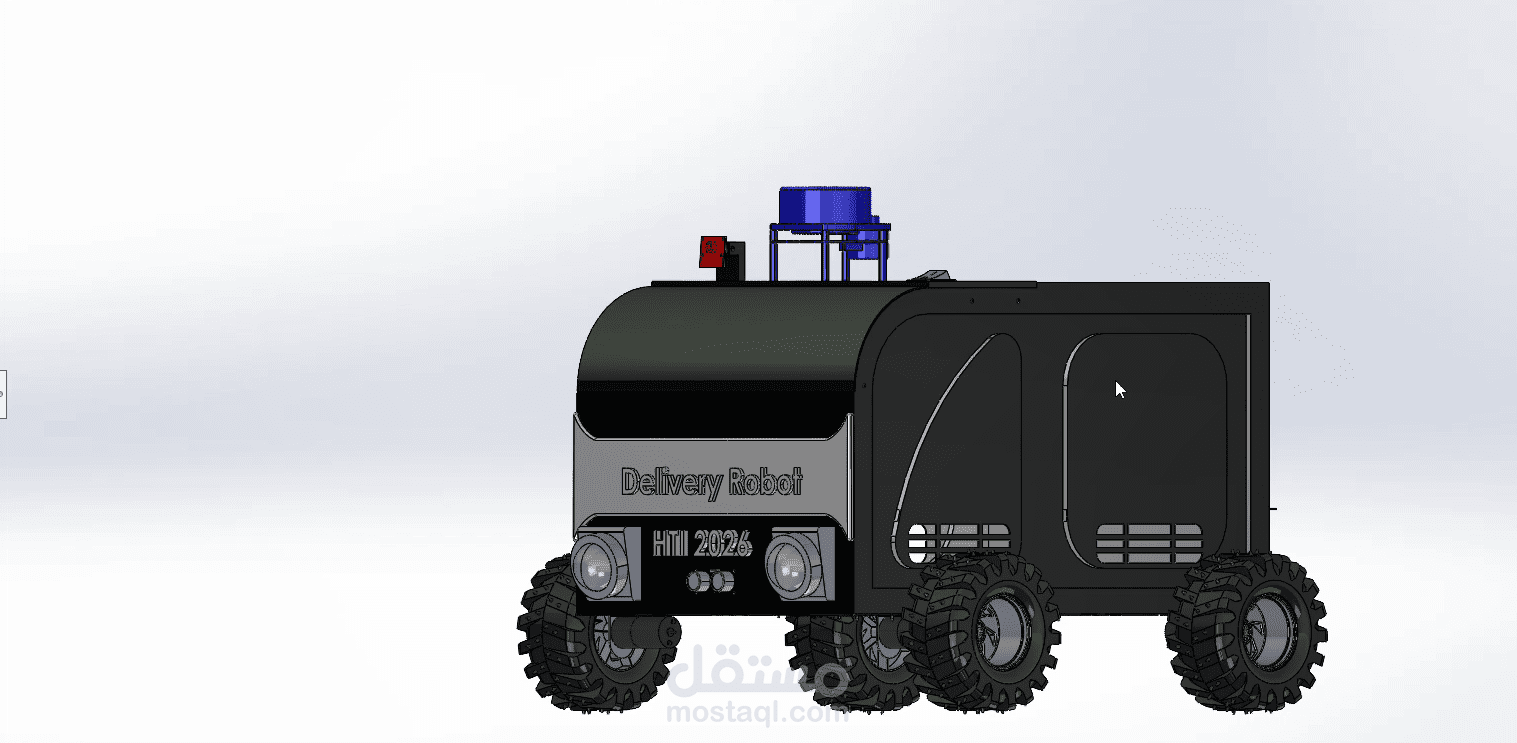
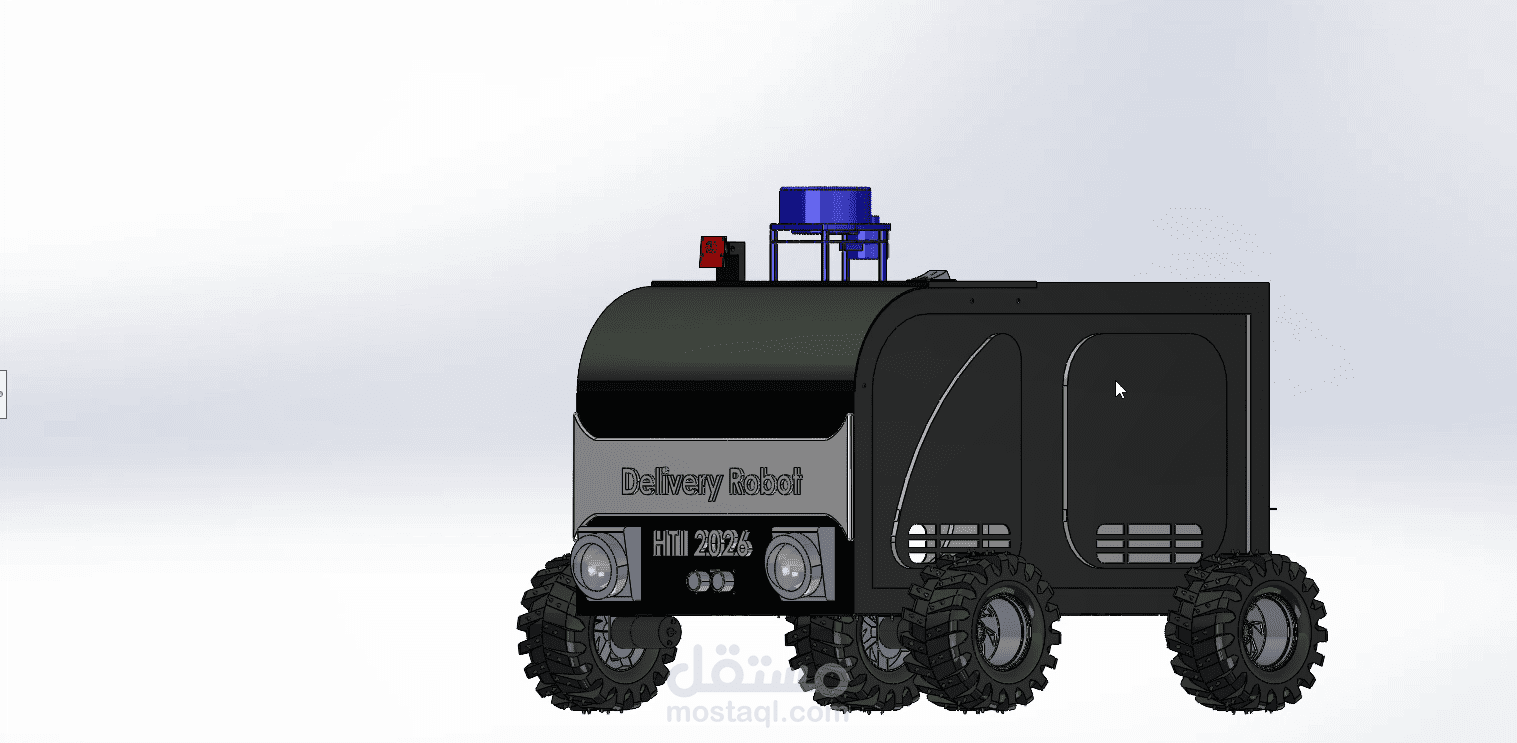
روبوت توصيل داخلي ذاتي القيادة (Autonomous Mobile Robot with ROS 2)
تفاصيل العمل
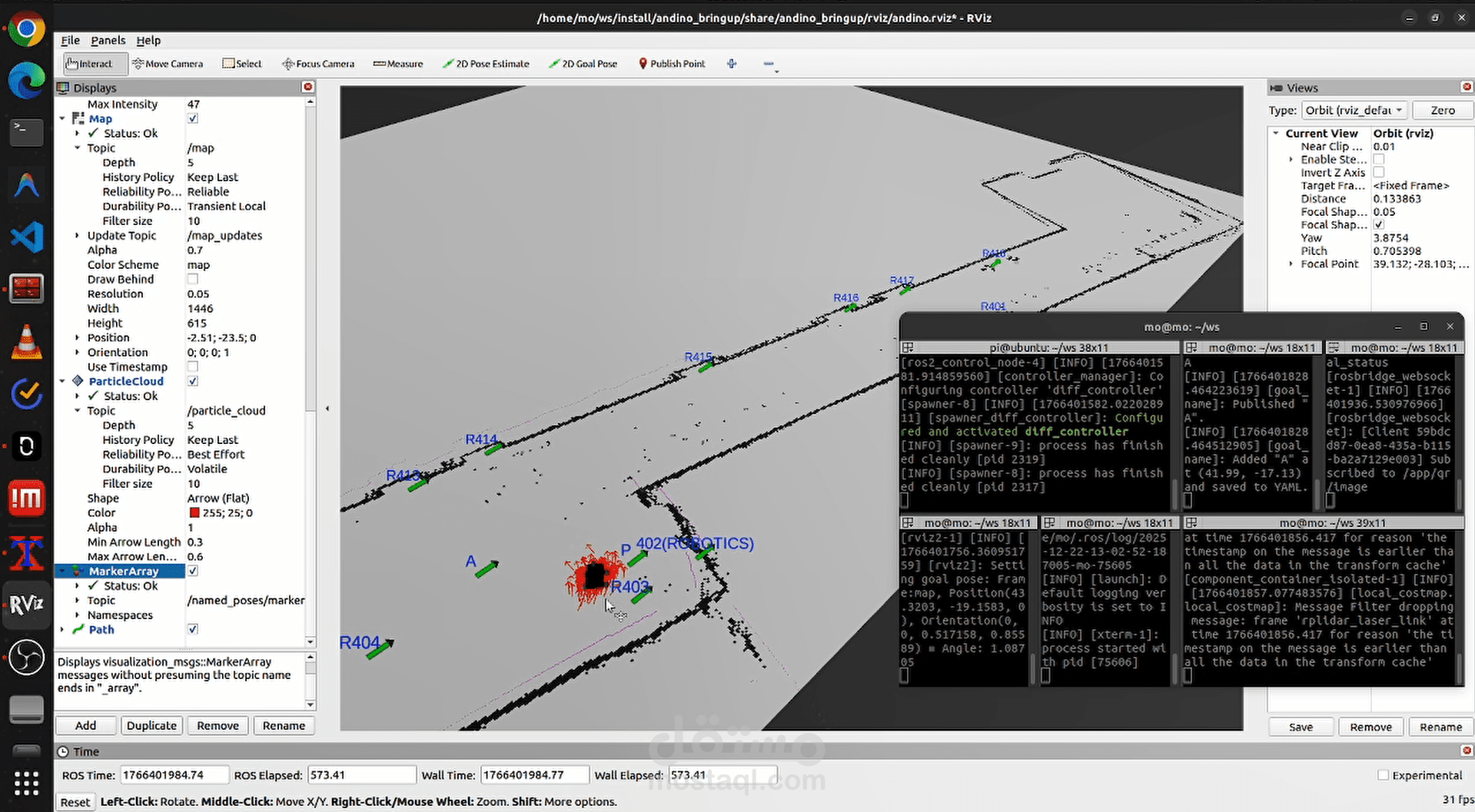

نظام الملاحة (Navigation): استخدام Nav2 و SLAM Toolbox لرسم الخرائط وتحديد الموقع بدقة، مع دمج الحساسات (Sensor Fusion) باستخدام EKF.
الهاردوير: تصميم هيكل ميكانيكي (Custom Chassis) تم التحقق منه بـ FEA، يعمل بمحركات DC ومتحكمات Arduino و Raspberry Pi 4.
الأمان: نظام تفادي عوائق لحظي لضمان سلامة التفاعل البشري في المكاتب والمستشفيات.
هذا المشروع يثبت القدرة على بناء أنظمة ميكاترونيكس معقدة من الصفر وحتى التشغيل الذاتي."