Line Follower Robot
تفاصيل العمل
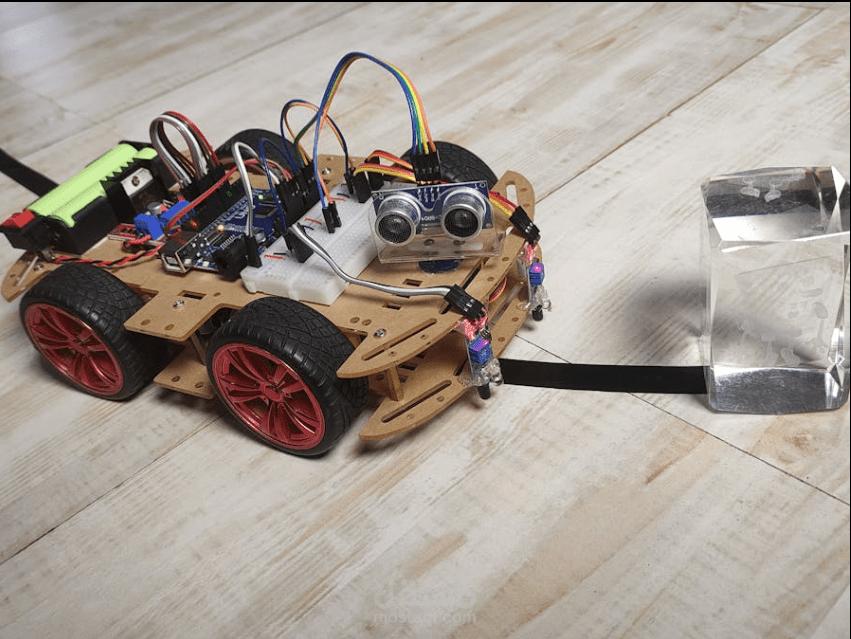
قمت بتصميم وتنفيذ روبوت ذكي لتتبّع المسار (Line Follower Robot) يعتمد على نظام تحكم مدمج للتحرك بدقة مع استخدام حساسات لتتبّع الخط واتخاذ القرار المناسب أثناء الحركة
تم دعم الروبوت بشاشة عرض لعرض البيانات والقراءات في الوقت الحقيقي، مثل:
حالة الروبوت
قراءات الحساسات
وضع التشغيل (Running / Stopped)