universal joint
تفاصيل العمل
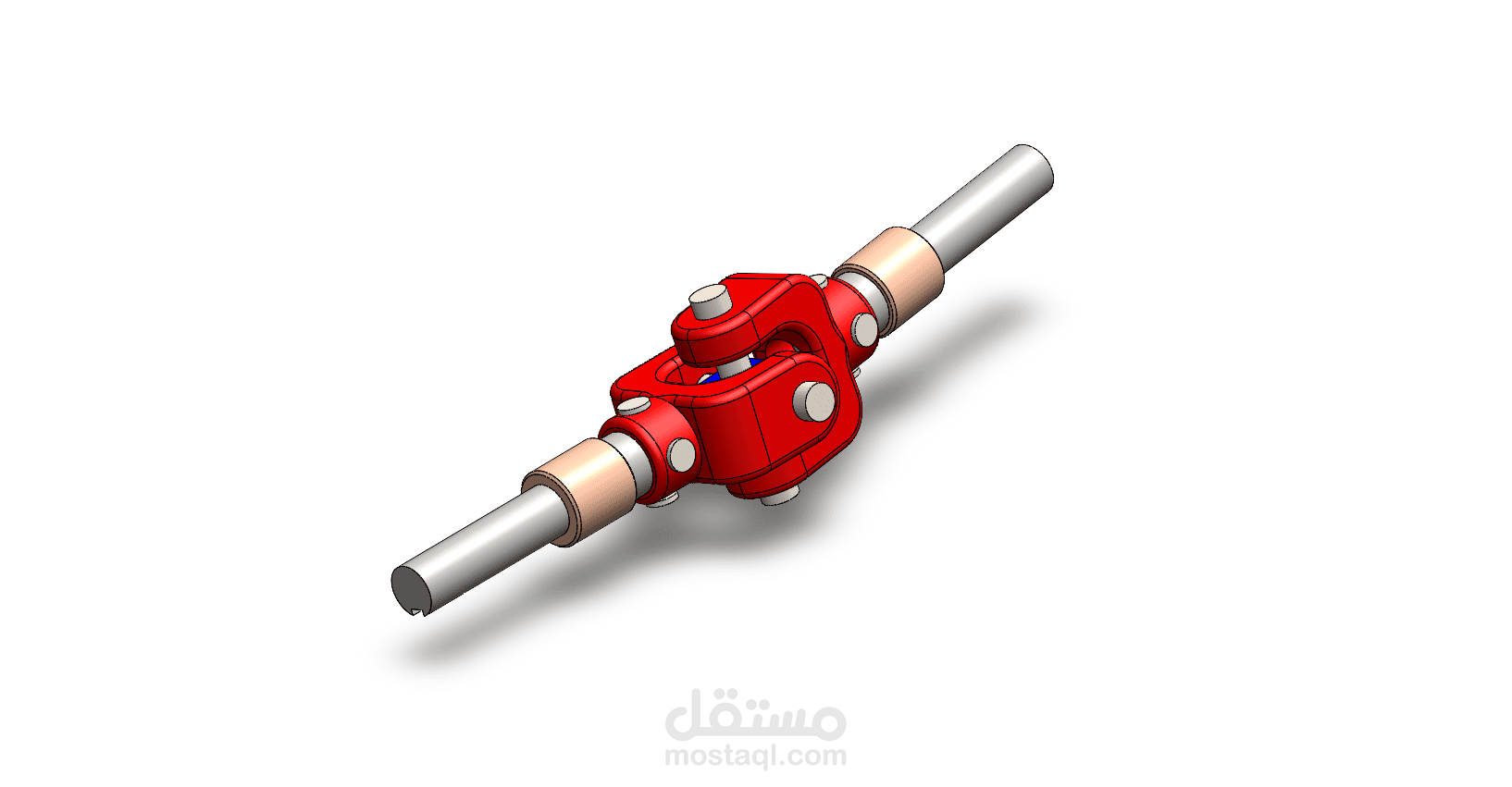
تصميم Universal Joint كنموذج ميكانيكي ثلاثي الأبعاد ضمن مجهود ذاتي، يهدف إلى دراسة آلية نقل الحركة بين محورين غير متوازيين مع ضمان دقة التزامن والحركة الميكانيكية الصحيحة.
تم تنفيذ التصميم بالكامل باستخدام SolidWorks مع التركيز على دقة الأبعاد، تنظيم الأجزاء، ووضوح آلية الحركة داخل التجميع، بما يعكس فهماً هندسياً عملياً لمبادئ نقل الحركة والتصميم الميكانيكي.
يعكس هذا العمل الاهتمام بالتطوير الذاتي والقدرة على بناء نماذج ميكانيكية دقيقة وقابلة للتطوير.