Arduino programming for a moving robot
تفاصيل العمل
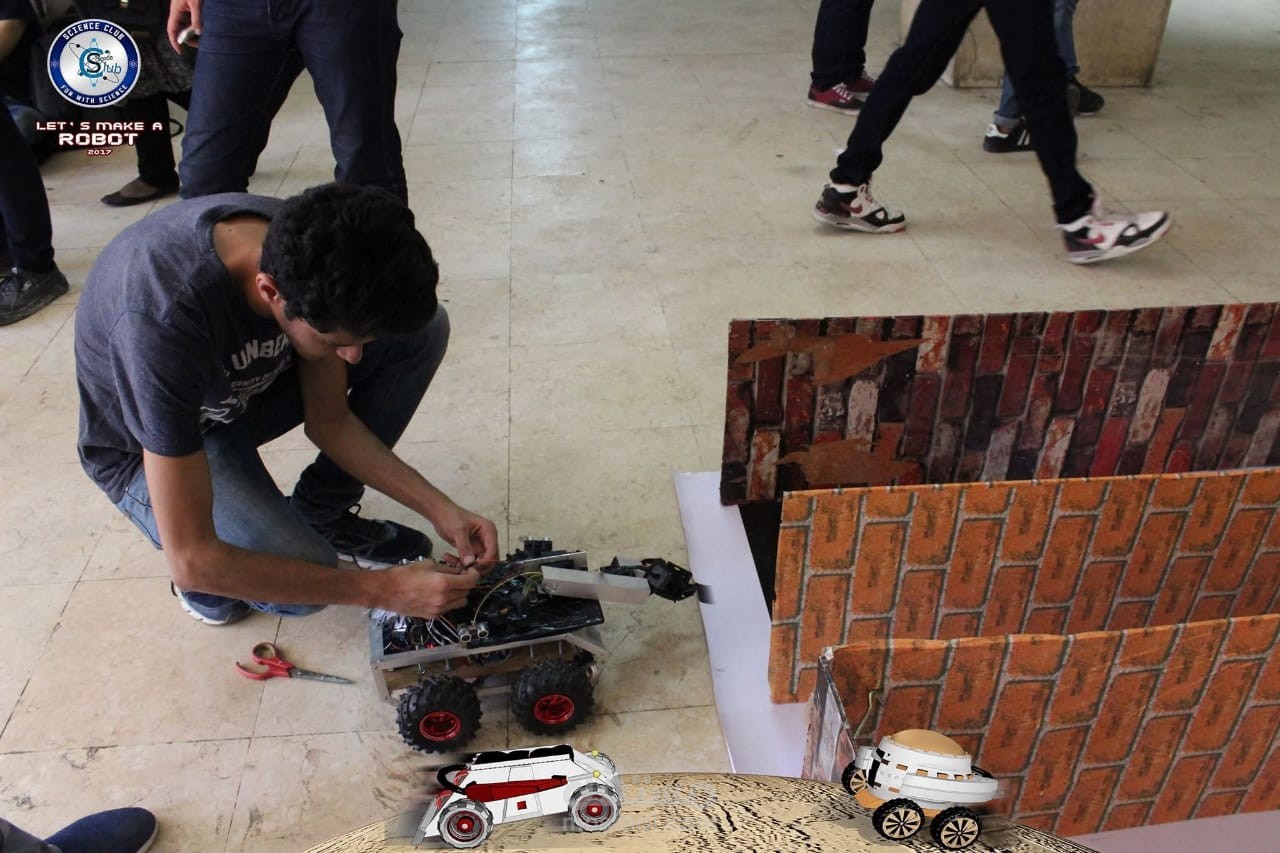
Along with my team we built a robot of 2-linkage arm with 3-DOF,
We added line following system, color detecting and self-solving
maze.
We used Arduino, Color sensor, Ultrasonic sensor, accelerometer,
servos for the arm and motor drivers for wheels.
I was responsible for the Arduino programming with two of my
teammates