Predictive Modeling for Road Safety Analysis
تفاصيل العمل

الهدف (Objective)
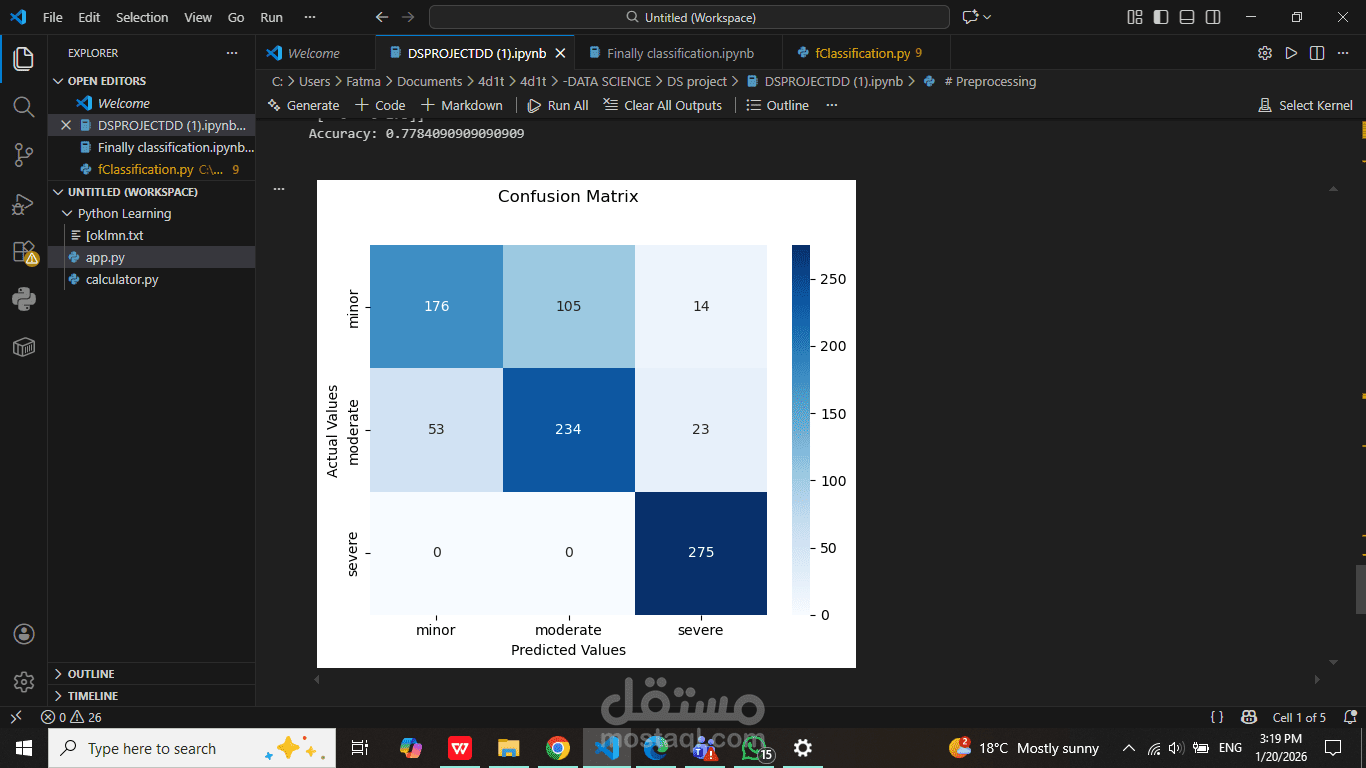
تطوير نموذج تعلم عميق (Deep Learning) للتنبؤ بمدى خطورة الحوادث المرورية بناءً على ظروف الطريق وخبرة السائق.
التنفيذ التقني (Technical Execution)
تنظيف البيانات ومعالجتها مسبقاً باستخدام مكتبات لغة Python.
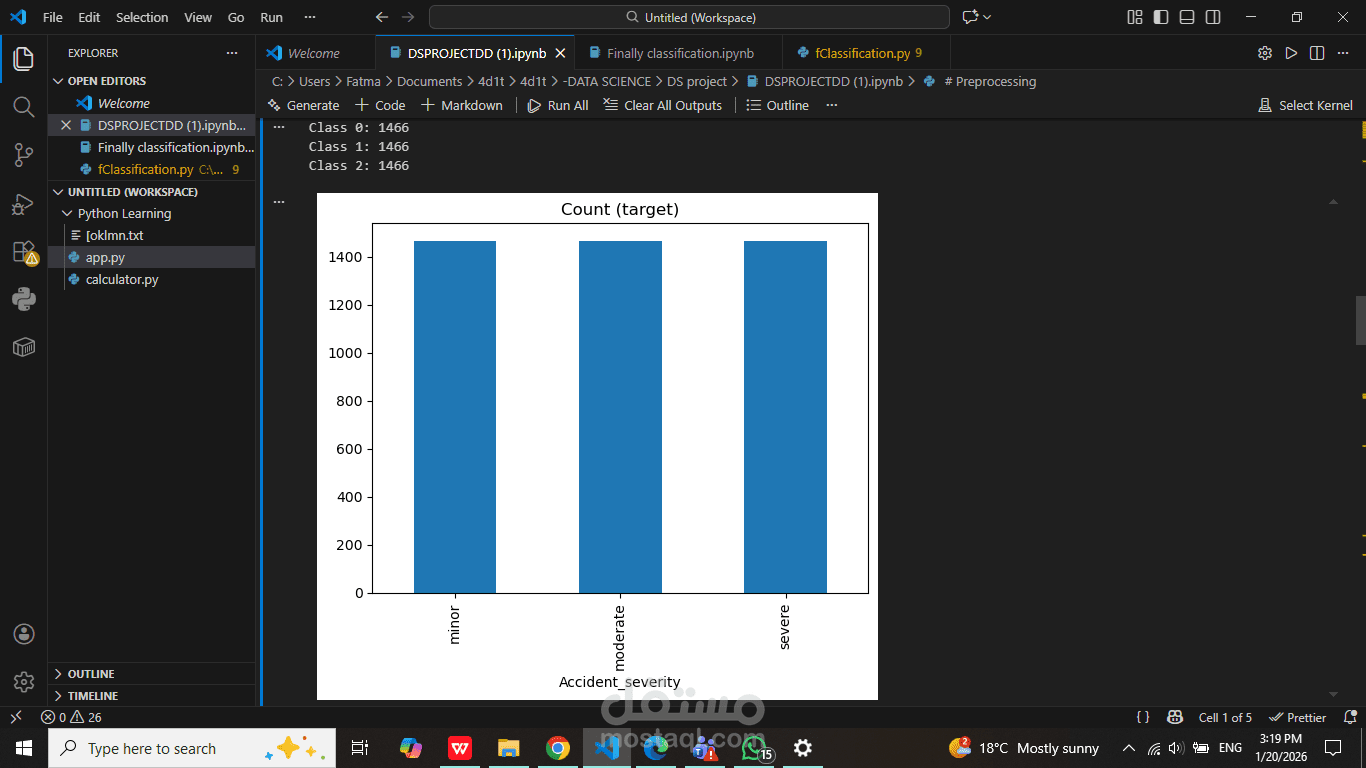
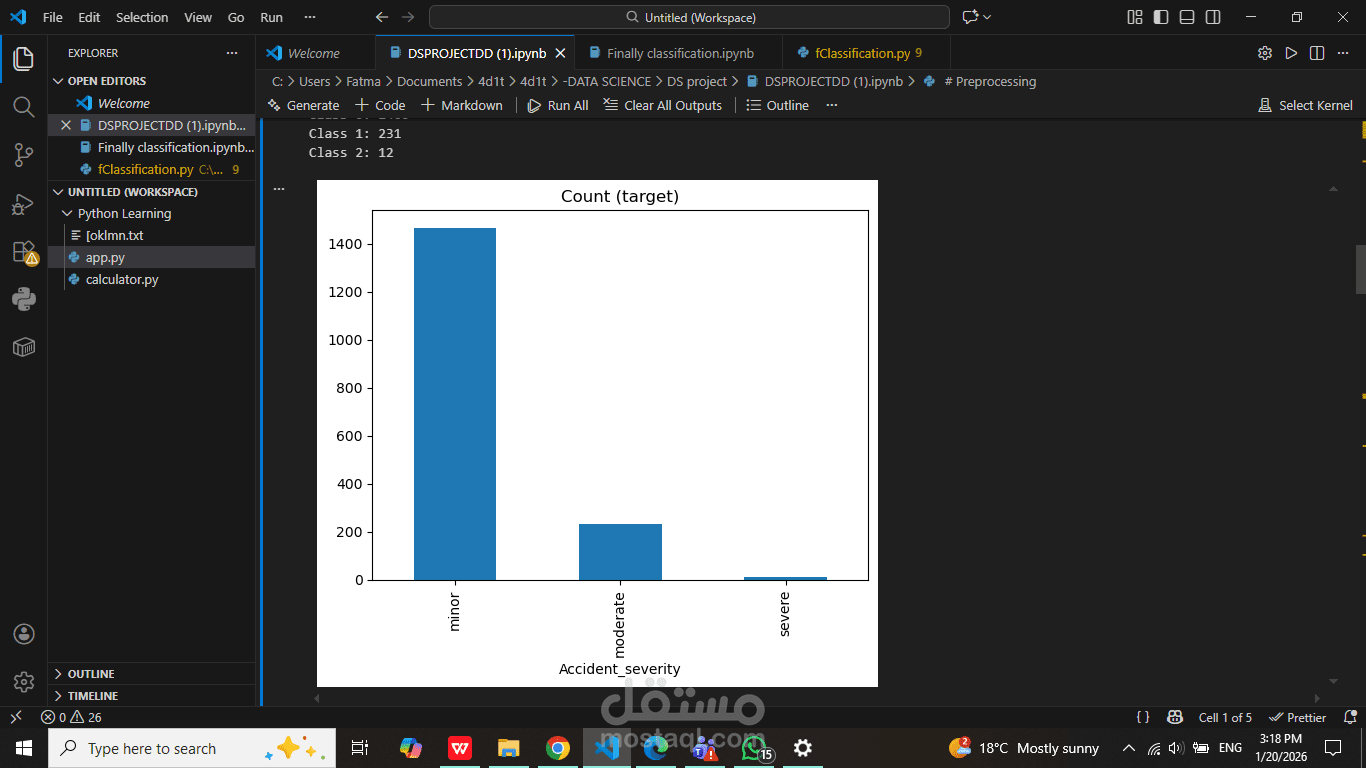
معالجة مشكلة عدم توازن الفئات (Class Imbalance) الحادة باستخدام تقنيات Oversampling لضمان عدالة النموذج ودقته.
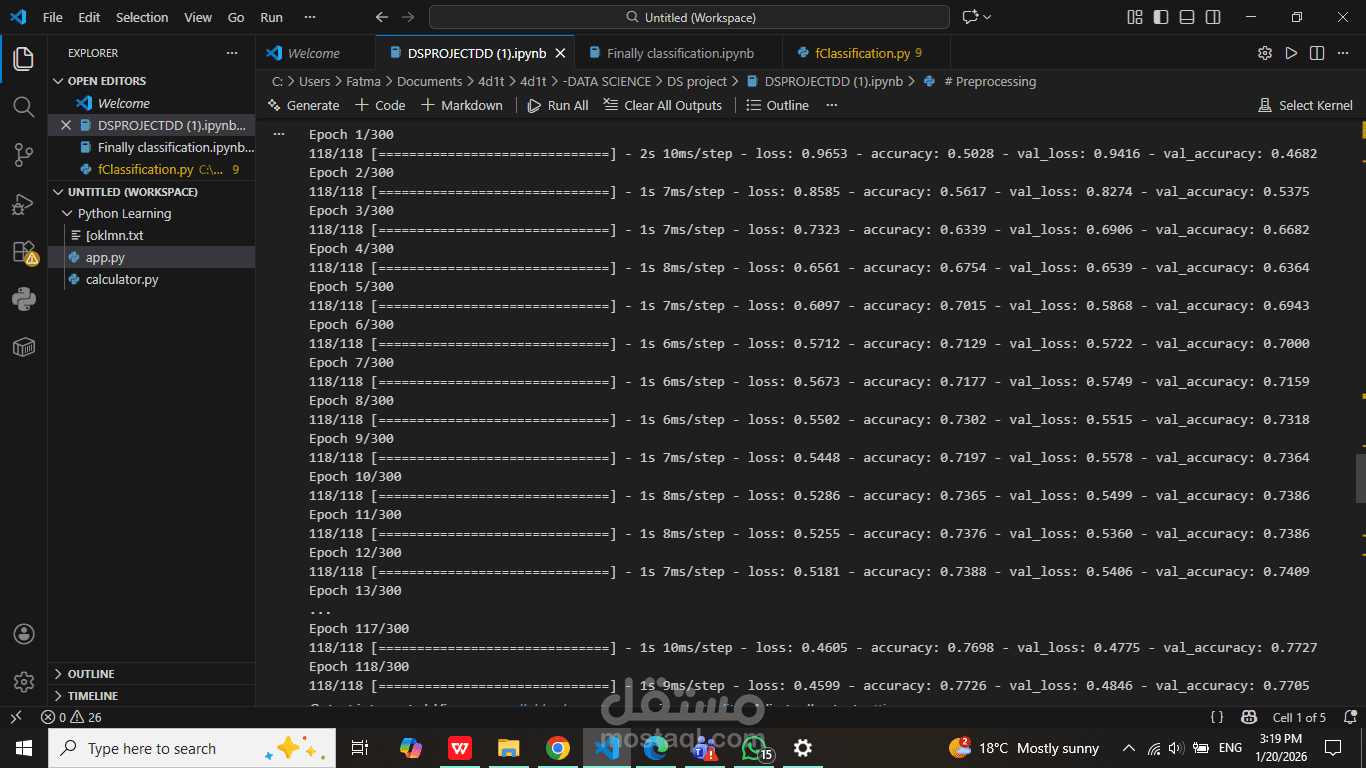
بناء شبكة عصبية (Neural Network) باستخدام TensorFlow/Keras تتميز بهيكلية متعددة الطبقات تم تحسينها بدقة.
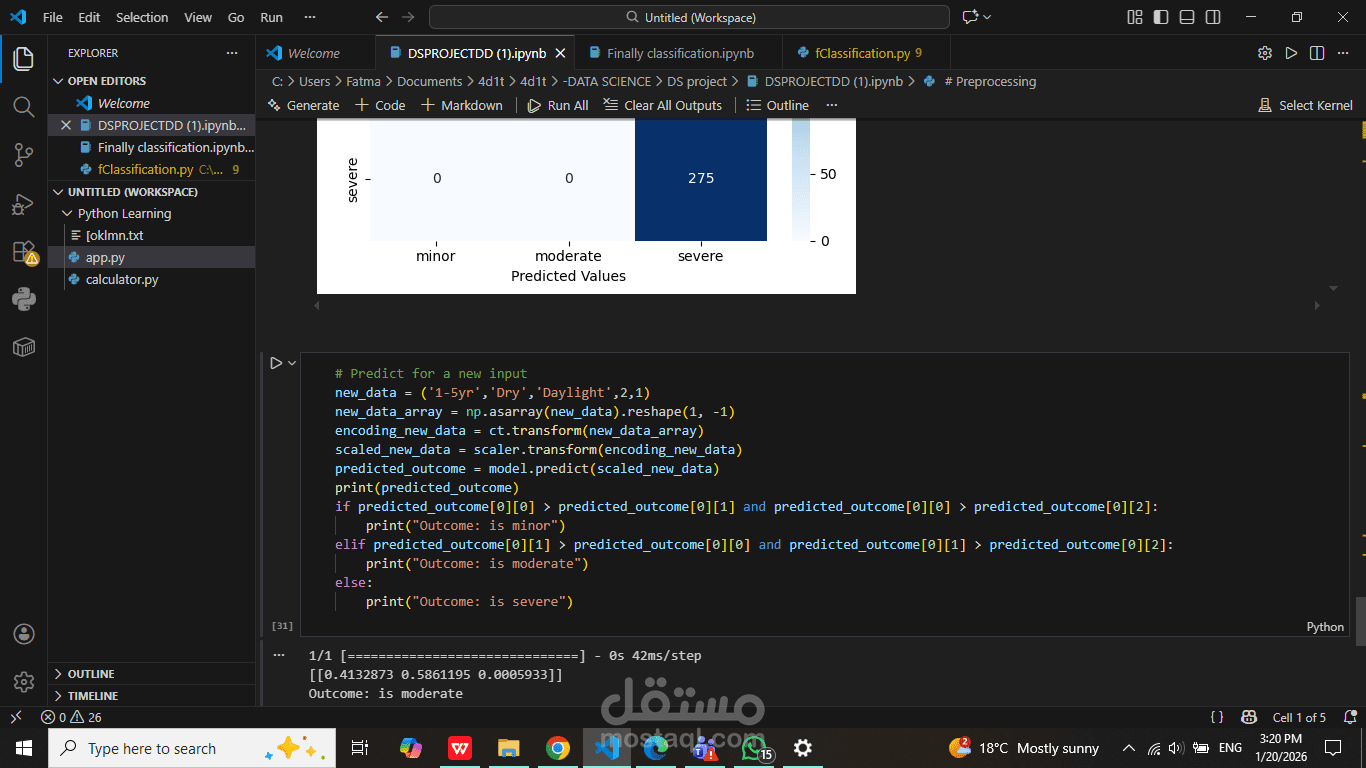
النتيجة الرئيسية (Key Outcome)
تقديم نظام عالي الدقة قادر على تحديد السيناريوهات عالية المخاطر لدعم اتخاذ قرارات استباقية لتعزيز السلامة على الطرق